这是《数字逻辑与数字集成电路(第2版)》的学习笔记。
你知道全加器的四种画法吗?
2023 年春季学期考过一次全加器,2024 年春应该不会再考一次了吧?
第 1 章 数制和编码 十进制数的二进制编码 8421 码(BCD 码)
8421 码是一种有权码,由于从高到低位权分别为 8 , 4 , 2 , 1 8, 4, 2, 1 8 , 4 , 2 , 1 1010 ∼ 1111 1010 \sim 1111 1010 ∼ 1111
5421 码
5421 码是一种有权码,由于从高到低位权分别为 5 , 4 , 2 , 1 5, 4, 2, 1 5 , 4 , 2 , 1 5 5 5 1000 1000 1000 0101 0101 0101 会有歧义 ,故在实际运用中需要指定码表。
2421 码
2421 码是一种有权码,由于从高到低位权分别为 2 , 4 , 2 , 1 2, 4, 2, 1 2 , 4 , 2 , 1
余三码
余三码是一种无权码,由 8421 码加 ( 0011 ) 2 (0011)_2 ( 0011 ) 2 a , b a, b a , b
如果 a + b ≤ 9 a + b \le 9 a + b ≤ 9 a + b − 0011 a + b - 0011 a + b − 0011
如果 a + b ≥ 10 a + b \ge 10 a + b ≥ 10 10000 + ( a + b − 0011 ) − 1010 = a + b + 0011 10000 + (a + b - 0011) - 1010 = a + b + 0011 10000 + ( a + b − 0011 ) − 1010 = a + b + 0011
注意,这里的 10000 = 1010 10000 = 1010 10000 = 1010 1 1 1 10 10 10 1 1 1 10000 = ( 10 ) 10 = 1010 10000 = (10)_{10} = 1010 10000 = ( 10 ) 10 = 1010
规则可以简记为:如果两个余三码相加没有进位,则和数要减 3 3 3 3 3 3
格雷码
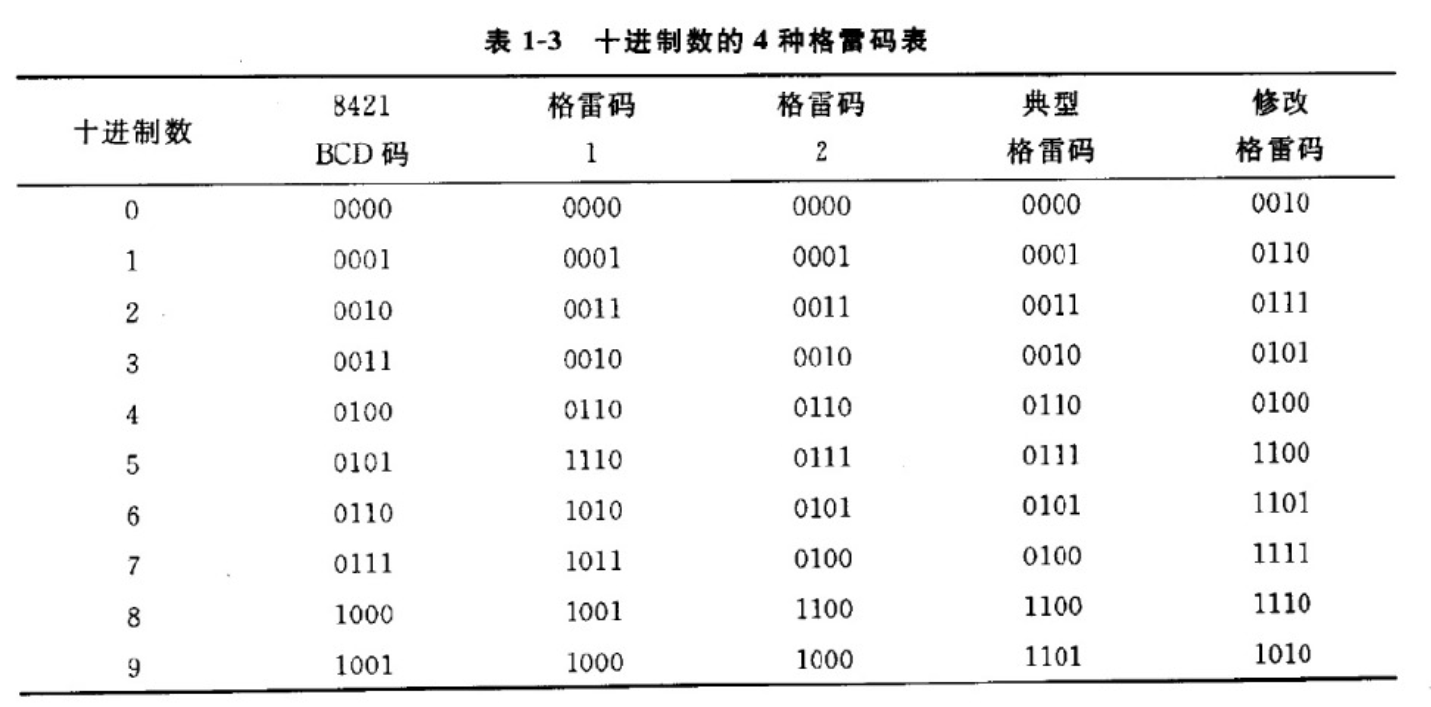
格雷码是一种无权码,特点是任何两个相邻的十进制数的格雷码仅有一位不同 (Hamming distance 为 1 1 1
十进制数的 4 种格雷码表 格雷码 1
是一种反射码 ,因为 x x x 10 − x 10 - x 10 − x
典型格雷码
假设待编码数 x = ∑ i = 0 n − 1 b i ⋅ 2 i x = \sum_{i = 0}^{n - 1}b_i\cdot2^i x = ∑ i = 0 n − 1 b i ⋅ 2 i y = ∑ i = 0 n − 1 = g i ⋅ 2 i y = \sum_{i = 0}^{n - 1} = g_i\cdot 2^i y = ∑ i = 0 n − 1 = g i ⋅ 2 i g i = b i + 1 ⊕ b i g_i = b_{i +1}\oplus b_i g i = b i + 1 ⊕ b i
修改格雷码
修改格雷码等于典型格雷码加 ( 0011 ) 2 (0011)_2 ( 0011 ) 2
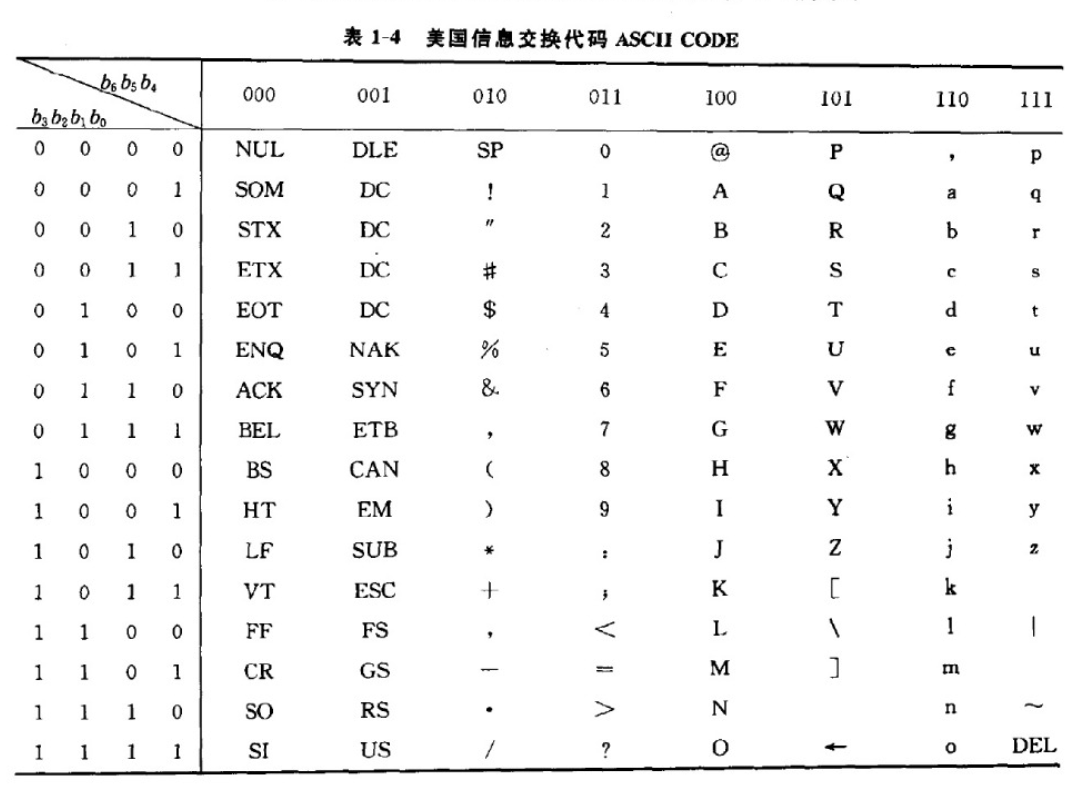
ASCII 码
美国信息交换代码 ASCII CODE
数字:高三位 011 011 011
大写字母:高三位 100 100 100
小写字母:高三位 110 110 110
说明人们在设计 ASCII 的时候还是动了脑子的。
第 2 章 逻辑代数及逻辑函数的化简 逻辑代数的基本原理 基本公式
个人认为最重要的公式只有一个:
( consensus ) { A B + A ‾ C + B C = A B + A ‾ C ( A + B ) ( A ‾ + C ) ( B + C ) = ( A + B ) ( A ‾ + C )
(\text{consensus})\;
\begin{cases}
AB + \overline{A}C + BC = AB + \overline{A}C \\
(A+B)(\overline{A}+C)(B+C) = (A+B)(\overline{A}+C)
\end{cases}
( consensus ) { A B + A C + BC = A B + A C ( A + B ) ( A + C ) ( B + C ) = ( A + B ) ( A + C ) B = T B = \text{T} B = T (absorption) A + A ‾ C = A + C
\text{(absorption)}\; A + \overline{A}C = A + C
(absorption) A + A C = A + C
使用公式法化简,最终很容易忘记使用吸收律。例如,得到答案
A D + B C + A ‾
AD+ BC + \overline{A}
A D + BC + A D + B C + A ‾ D + BC + \overline{A} D + BC + A
反演规则和对偶规则
反演规则 本质上是 De Morgan 律的使用。F ‾ \overline{F} F F F F
将所有“与”替换为“或”,“或”替换为“与”
将所有变量替换为反变量,反变量替换为原变量
将所有 0 0 0 1 1 1 1 1 1 0 0 0
之后得到的结果。反演规则可以帮助我们方便地求出一个函数的反函数。
对偶规则 是指,对偶式 F ′ F' F ′ F F F
将所有“与”替换为“或”,“或”替换为“与”
将所有 0 0 0 1 1 1 1 1 1 0 0 0
之后得到的结果。关于对偶规则有一个显然的结论:如果 F = G F = G F = G F ′ = G ′ F' = G' F ′ = G ′
显然,( F ′ ) ′ = F (F')' = F ( F ′ ) ′ = F
附加公式(不考)
附加公式 本质上是一种通过枚举函数 f f f x x x
附加公式一:
x ⋅ f ( x , x ‾ , y , ⋯ , z ) = x ⋅ f ( 1 , 0 , y , ⋯ , z ) x ‾ ⋅ f ( x , x ‾ , y , ⋯ , z ) = x ‾ ⋅ f ( 0 , 1 , y , ⋯ , z ) x + f ( x , x ‾ , y , ⋯ , z ) = x + f ( 0 , 1 , y , ⋯ , z ) x ‾ + f ( x , x ‾ , y , ⋯ , z ) = x ‾ + f ( 1 , 0 , y , ⋯ , z )
\begin{align*}
x \cdot f(x, \overline{x}, y, \cdots, z) & = x \cdot f(1, 0, y, \cdots, z) \\
\overline{x} \cdot f(x, \overline{x}, y, \cdots, z) & = \overline{x} \cdot f(0, 1, y, \cdots, z) \\
x + f(x, \overline{x}, y, \cdots, z) & = x + f(0, 1, y, \cdots, z) \\
\overline{x} + f(x, \overline{x}, y, \cdots, z) & = \overline{x} + f(1, 0, y, \cdots, z)
\end{align*}
x ⋅ f ( x , x , y , ⋯ , z ) x ⋅ f ( x , x , y , ⋯ , z ) x + f ( x , x , y , ⋯ , z ) x + f ( x , x , y , ⋯ , z ) = x ⋅ f ( 1 , 0 , y , ⋯ , z ) = x ⋅ f ( 0 , 1 , y , ⋯ , z ) = x + f ( 0 , 1 , y , ⋯ , z ) = x + f ( 1 , 0 , y , ⋯ , z ) f ( x , x ‾ , y , ⋯ , z ) = x ⋅ f ( x , x ‾ , y , ⋯ , z ) + x ‾ ⋅ f ( x , x ‾ , y , ⋯ , z ) = x ⋅ f ( 1 , 0 , y , ⋯ , z ) + x ‾ ⋅ f ( 0 , 1 , y , ⋯ , z ) f ( x , x ‾ , y , ⋯ , z ) = [ x + f ( x , x ‾ , y , ⋯ , z ) ] ⋅ [ x ‾ + f ( x , x ‾ , y , ⋯ , z ) ] = [ x + f ( 0 , 1 , y , ⋯ , z ) ] ⋅ [ x ‾ + f ( 1 , 0 , y , ⋯ , z ) ]
\begin{align*}
f(x, \overline{x}, y, \cdots, z) & = x\cdot f(x, \overline{x}, y, \cdots, z) + \overline{x} \cdot f(x, \overline{x}, y, \cdots, z) \\
& = x\cdot f(1, 0, y, \cdots, z) + \overline{x} \cdot f(0, 1, y, \cdots, z) \\
f(x, \overline{x}, y, \cdots, z) & = [x + f(x, \overline{x}, y, \cdots, z)]\cdot[\overline{x} + f(x, \overline{x}, y, \cdots, z)] \\
& = [x + f(0, 1, y, \cdots, z)]\cdot[\overline{x} + f(1, 0, y, \cdots, z)]
\end{align*}
f ( x , x , y , ⋯ , z ) f ( x , x , y , ⋯ , z ) = x ⋅ f ( x , x , y , ⋯ , z ) + x ⋅ f ( x , x , y , ⋯ , z ) = x ⋅ f ( 1 , 0 , y , ⋯ , z ) + x ⋅ f ( 0 , 1 , y , ⋯ , z ) = [ x + f ( x , x , y , ⋯ , z )] ⋅ [ x + f ( x , x , y , ⋯ , z )] = [ x + f ( 0 , 1 , y , ⋯ , z )] ⋅ [ x + f ( 1 , 0 , y , ⋯ , z )]
逻辑函数的化简
化简的要求:
“与”项(即乘积项)的个数最少;
在满足上述条件的情况下,每个乘积项的变量数最少。
公式法
个人认为最常见的是这个循环对称式:
A B ‾ + B C ‾ + A ‾ C
A\overline{B} + B\overline{C} + \overline{A}C
A B + B C + A C A B ‾ + B C ‾ + A ‾ C = A B ‾ + B C ‾ + A ‾ C + ( A ‾ B + B ‾ C + A C ‾ ) = A B ‾ + B C ‾ + A ‾ C + A ‾ B = ⋯
\begin{align*}
A\overline{B} + B\overline{C} + \overline{A}C & = A\overline{B} + B\overline{C} + \overline{A}C + (\overline{A}B + \overline{B}C + A\overline{C}) \\
& = A\overline{B} + B\overline{C} + \overline{A}C + \overline{A}B \\
& = \cdots
\end{align*}
A B + B C + A C = A B + B C + A C + ( A B + B C + A C ) = A B + B C + A C + A B = ⋯ 任意子集 。
有时也会出现
A ‾ B ‾ + A C ‾ + B C ,
\overline{A}\;\overline{B} + A\overline{C} + BC,
A B + A C + BC , B ← B ‾ B \gets{\overline{B}} B ← B
Karnaugh 图法
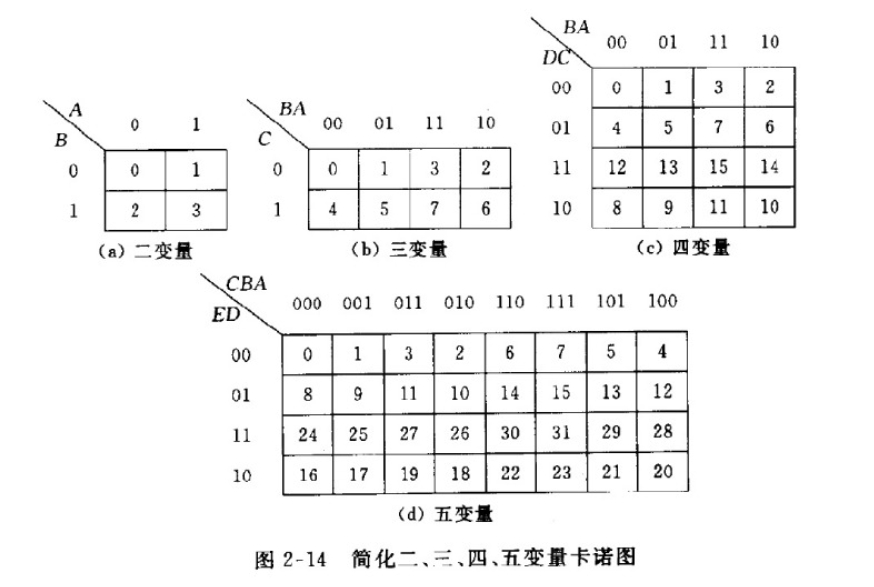
Karnaugh 图 Karnaugh 图的构造 :二至五变量的表格横纵坐标分别为 B \ A , C \ B A , D C \ B A , E D \ C B A B\backslash A, C\backslash BA, DC\backslash BA, ED\backslash CBA B \ A , C \ B A , D C \ B A , E D \ CB A
例如五变量 Karnaugh 图的横坐标:首先是 000 000 000 001 001 001 001 001 001 001 001 001 000 000 000 011 011 011 010 010 010 010 010 010 000 , 001 , 011 , 010 , 110 , 111 , 101 , 100.
000,001,011,010,110,111,101,100.
000 , 001 , 011 , 010 , 110 , 111 , 101 , 100. Karnaugh 图的化简 :包含一个最小项的小方块被称为 0 0 0 2 2 2 n n n n + 1 n+1 n + 1
最终覆盖所有值为 1 1 1
左右边界是“循环”的,所以也相邻;
同理可以推出,四个角的方块也相邻;
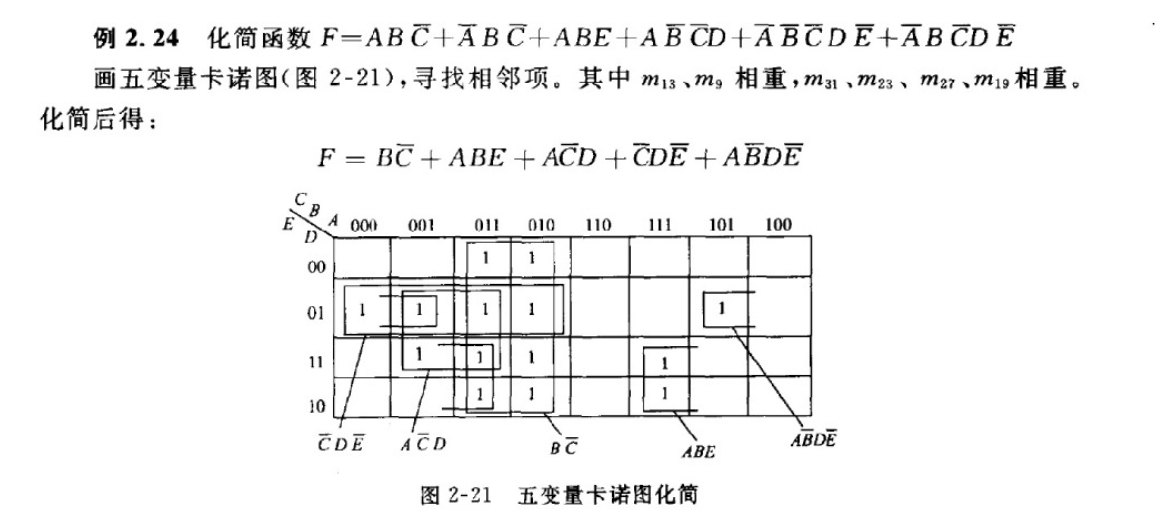
五变量卡诺图注意“相重”,即左右对称。
五变量 Karnaugh 图的化简 似乎题干有误,最后一项应为 A B ‾ C D E ‾ A\overline{B}CD\overline{E} A B C D E A B E ABE A BE
需要注意的一点是,如果一个高维块被几个必需的低维块所覆盖 ,则不应包含 该高维块。
每次 Karnaugh 图化简完后,一定要检查是否有冗余的块!
求某一函数 F F F 0 0 0
Quine-McCluskey 化简法(不考)
这玩意儿是真复杂,要是手算真不如 Karnaugh 图。
不考。亏我还看书看了那么长时间。
Quine-McCluskey 化简法遵循两个步骤:
求出全部的质蕴含项;
从质蕴含项中选出必要质蕴涵项。
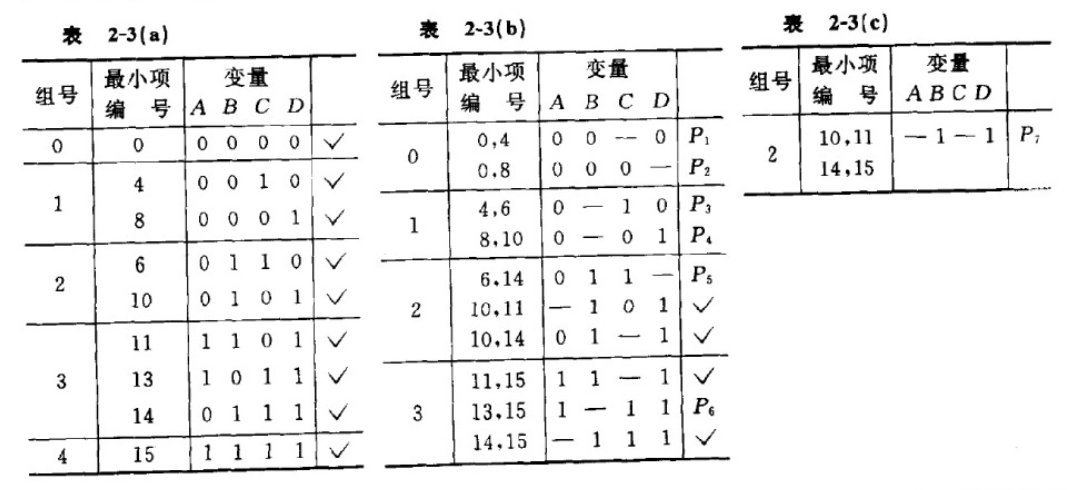
求出全部的质蕴含项 :
对于函数内出现过的最小项按照二进制数取值中 1 1 1
相邻组看是否能合并,例如:
0001 0001 0001 0011 0011 0011 00 − 1 00-1 00 − 1 00 − 1 00-1 00 − 1 10 − 1 10-1 10 − 1 − 0 − 1 -0-1 − 0 − 1 如果能合并,就在两原项后打 ✓ \checkmark ✓
直到无法合并为止。此时没有 ✓ \checkmark ✓ P 1 , P 2 , ⋯ P_1, P_2, \cdots P 1 , P 2 , ⋯
考虑求 F = f ( A , B , C , D ) = ∑ m 4 ( 0 , 4 , 6 , 8 , 10 , 11 , 13 , 14 , 15 ) F = f(A, B, C, D) = \sum m^4(0, 4, 6, 8, 10, 11, 13, 14, 15) F = f ( A , B , C , D ) = ∑ m 4 ( 0 , 4 , 6 , 8 , 10 , 11 , 13 , 14 , 15 )
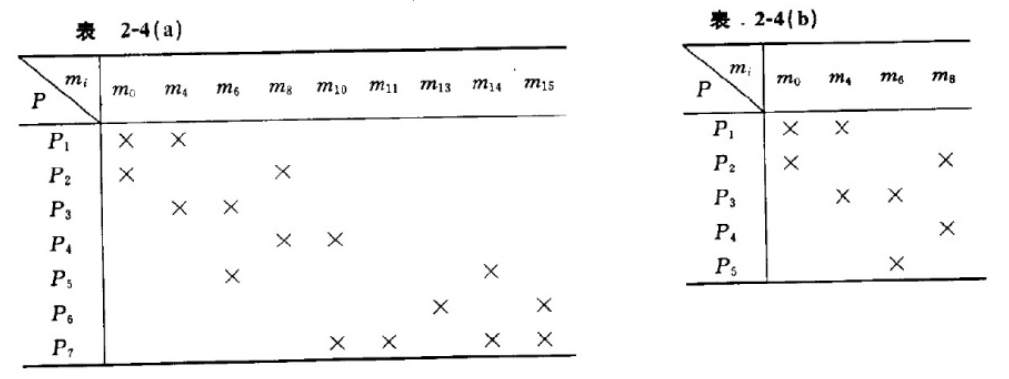
求全部质蕴含项 选出必要质蕴含项 :
对于两行 来说,如果 a a a b b b 子集 ,那么将 a a a
对于两列 来说,如果 a a a b b b 超集 ,那么将 a a a
最终剩下的质蕴含项即为必要质蕴涵项。值得注意的是,行、列消去中先进行哪个消去并不影响简化结果。
仍使用上例,过程如下:
选出必要质蕴含项 最终必要质蕴含项为 P 1 , P 2 , P 3 , P 4 , P 5 P_1, P_2, P_3, P_4, P_5 P 1 , P 2 , P 3 , P 4 , P 5 F = P 1 + P 2 + P 3 + P 4 + P 5 = A ‾ B ‾ C D + B ‾ C ‾ D ‾ + B C D ‾ + A C ‾ + A B .
F = P_1 + P_2 + P_3 + P_4 + P_5 = \overline{A}\;\overline{B}CD + \overline{B}\;\overline{C}\;\overline{D} + BC\overline{D} + A\overline{C} + AB.
F = P 1 + P 2 + P 3 + P 4 + P 5 = A B C D + B C D + BC D + A C + A B .
多输出逻辑函数的 Quine-McCluskey 化简法(不考)
尽管每个函数不是最简,但是只要找到函数的公共“与”项,就能达到最佳的总体效果。
求出各个函数的公共质蕴含项 :
在表上分别写 F 1 , F 2 , ⋯ F_1, F_2, \cdots F 1 , F 2 , ⋯ △ \triangle △ m i m_i m i F \mathscr{F} F m j m_j m j G \mathscr{G} G m i m_i m i m j m_j m j m i m_i m i m j m_j m j F ∩ G ≠ ∅ \mathscr{F} \cap \mathscr{G} \neq \varnothing F ∩ G = ∅
只有当 F ⊂ G \mathscr{F} \subset \mathscr{G} F ⊂ G F \mathscr{F} F ✓ \checkmark ✓
选出必要质蕴含项 :
区别在于,列消去只能在在 F 1 , F 2 , ⋯ F_1, F_2, \cdots F 1 , F 2 , ⋯
确定每个函数的必要质蕴含项 :
属于多个函数的必要质蕴涵项中只有部分与单一函数有关,所以还需要进一步计算,从中选出每个函数的必要质蕴涵项。对于函数 F i F_i F i F i F_i F i F i F_i F i
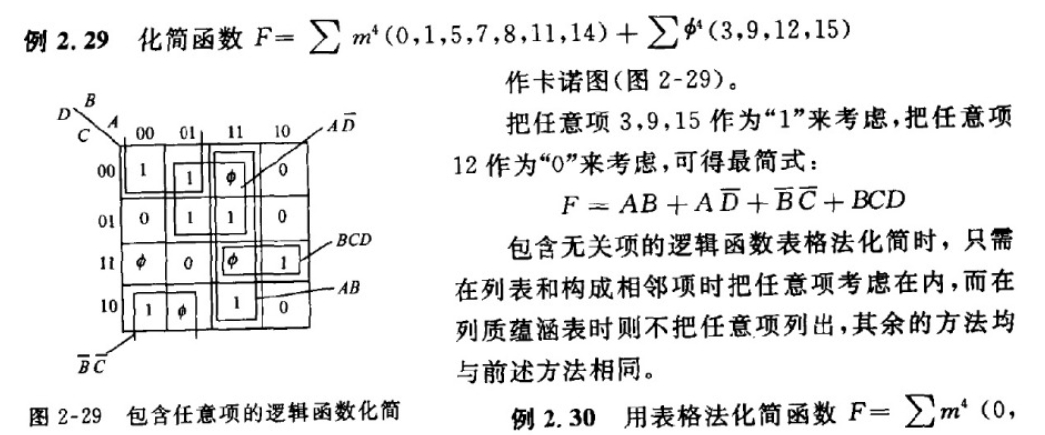
包含任意项的逻辑函数的化简
使用 Karnaugh 图 :将任意项的小方块中填入 ϕ \phi ϕ 1 1 1 0 0 0 12 12 12 0 0 0 3 , 9 , 15 3,9,15 3 , 9 , 15 1 1 1
包含任意项的逻辑函数化简 使用 Quine-McCluskey 化简法 :将任意项当做最小项之一参与相邻项的合并,但在最后的结果中并不把任意项当做质蕴含项列出,也不参与必要质蕴涵项的筛选。
不同形式逻辑函数的变换及化简(不考)
“与或”变为“与非-与非” :两次求反。例如 F = A B + A C + A D F = AB+AC+AD F = A B + A C + A D F = F ‾ ‾ = A B + A C + A D ‾ ‾ = A B ‾ ⋅ A C ‾ ⋅ A D ‾ ‾
F = \overline{\overline{F}} = \overline{\overline{AB+AC+AD}} = \overline{\overline{AB} \cdot \overline{AC} \cdot \overline{AD}}
F = F = A B + A C + A D = A B ⋅ A C ⋅ A D “与或”变为“或非-或非” :将对偶式求最简与非-与非表达式后再对 回来。例如 F = A B + A C ‾ + A ‾ C F = AB+A\overline{C}+\overline{A}C F = A B + A C + A C F ′ = ( A + B ) ( A + C ‾ ) ( A ‾ + C ) = A ‾ B C ‾ + A C + A B C F ′ = F ′ ‾ ‾ = A ‾ B C ‾ + A C + A B C ‾ ‾ = A ‾ B C ‾ ‾ ⋅ A C ‾ ⋅ A B C ‾ ‾ F = ( F ′ ) ′ = A ‾ + B + C ‾ ‾ + A + C ‾ + A + B + C ‾ ‾
\begin{align*}
F' & = (A+B)(A+\overline{C})(\overline{A}+C) \\
& = \overline{A}B\overline{C}+AC+ABC \\
F' & = \overline{\overline{F'}} \\
& = \overline{\overline{\overline{A}B\overline{C}+AC+ABC}} \\
& = \overline{\overline{\overline{A}B\overline{C}} \cdot \overline{AC} \cdot \overline{ABC}} \\
F & = (F')' \\
& = \overline{\overline{\overline{A} + B +\overline{C}} + \overline{A + C} + \overline{A + B + C}}
\end{align*}
F ′ F ′ F = ( A + B ) ( A + C ) ( A + C ) = A B C + A C + A BC = F ′ = A B C + A C + A BC = A B C ⋅ A C ⋅ A BC = ( F ′ ) ′ = A + B + C + A + C + A + B + C “与或”变为“或与非” :(用 Karnaugh 图等方式)求出 F ‾ \overline{F} F G G G G ‾ \overline{G} G F = A B + B ‾ C ‾ + A B C ‾ + A ‾ B C ‾ + A ‾ B ‾ C ‾ F = AB+\overline{B}\;\overline{C}+ AB\overline{C}+\overline{A}B\overline{C}+\overline{A}\;\overline{B}\;\overline{C} F = A B + B C + A B C + A B C + A B C
用 Karnaugh 图求得 F ‾ = A ‾ C + B ‾ C \overline{F} = \overline{A}C+\overline{B}C F = A C + B C F = F ‾ ‾ = A ‾ C + B ‾ C ‾
\begin{align*}
F & = \overline{\overline{F}} \\
& = \overline{\overline{A}C+\overline{B}C}
\end{align*}
F = F = A C + B C “与或”变为“或与” :同“或与非”,只是最后还需要再化简一次,例如上例中 F = A ‾ C + B ‾ C ‾ F = \overline{\overline{A}C+\overline{B}C} F = A C + B C F = A ‾ C + B ‾ C ‾ = ( A + C ‾ ) ( B + C ‾ )
\begin{align*}
F & = \overline{\overline{A}C+\overline{B}C} \\
& = (A+\overline{C})(B+\overline{C})
\end{align*}
F = A C + B C = ( A + C ) ( B + C ) “或与”变为“或非-或非” :对偶-化简-对偶-两次求反。例如 F = ( A ‾ + B ‾ ) ( A ‾ + C ‾ + D ‾ ) ( A + C ) ( B + C ‾ ) F = (\overline{A}+\overline{B})(\overline{A}+\overline{C}+\overline{D})(A+C)(B+\overline{C}) F = ( A + B ) ( A + C + D ) ( A + C ) ( B + C ) F ′ = A ‾ B ‾ + A ‾ C ‾ D ‾ + A C + B C ‾ = A ‾ B ‾ + A C + B C ‾ F = ( F ′ ) ′ = ( A ‾ + B ‾ ) ( A + C ) ( B + C ‾ ) F = F ‾ ‾ = ( A ‾ + B ‾ ) ( A + C ) ( B + C ‾ ) ‾ ‾ = A ‾ + B ‾ ‾ + A + C ‾ + B + C ‾ ‾ ‾
\begin{align*}
F' & = \overline{A}\;\overline{B} + \overline{A}\;\overline{C}\;\overline{D}+AC+B\overline{C} \\
& = \overline{A}\;\overline{B} + AC + B\overline{C} \\
F & = (F')' \\
& = (\overline{A}+\overline{B})(A+C)(B+\overline{C}) \\
F & = \overline{\overline{F}} \\
& = \overline{\overline{(\overline{A}+\overline{B})(A+C)(B+\overline{C})}} \\
& = \overline{\overline{\overline{A}+\overline{B}} + \overline{A+C} + \overline{B+\overline{C}}}
\end{align*}
F ′ F F = A B + A C D + A C + B C = A B + A C + B C = ( F ′ ) ′ = ( A + B ) ( A + C ) ( B + C ) = F = ( A + B ) ( A + C ) ( B + C ) = A + B + A + C + B + C
第 3 章 集成门电路与触发器 组合逻辑电路引言 组合逻辑电路的特点
电路的输出仅与输入的当前状态有关,和过去的状态无关;区别于与过去的状态有关的时序逻辑电路 。
集成逻辑电路的分类
按功能 分类:
按半导体制造工艺 分类:
按封装(外形) 分类:
双列直插
表面封装
BGA(Ball Grid Array)
PLCC
按集成规模 分类:小、中、大、超大(Very Large)、甚大(Ultra Large)规模集成电路
两大类半导体制造工艺技术的特点 工艺技术 速度 功耗 集成度
TTL 快 大 低 MOS 慢 小 高
目前常用器件使用 CMOS(互补金属氧化物半导体)工艺。
TTL 门电路 正逻辑与负逻辑
正逻辑 :高电平为 1 1 1 0 0 0 H = 1 , L = 0 \text{H} = 1, \text{L} = 0 H = 1 , L = 0
负逻辑 :高电平为 0 0 0 1 1 1 H = 0 , L = 1 \text{H} = 0, \text{L} = 1 H = 0 , L = 1
在不同逻辑下,同一个逻辑门电路实现的功能不同,例如
A A A B B B F F F
L \text{L} L L \text{L} L H \text{H} H H \text{H} H L \text{L} L H \text{H} H L \text{L} L H \text{H} H H \text{H} H H \text{H} H H \text{H} H L \text{L} L
在正逻辑下表示与非门 F = A B ‾ F = \overline{AB} F = A B F = A + B ‾ F = \overline{A+B} F = A + B
注意 :本博客遵循教材和 PPT 的习惯,采用正逻辑 。
典型的 TTL 门电路(不考)
学不会;幸亏不考。
TTL 与非门电路的外部特性与级联
技术参数 :
扇入:一个门的可用输入 数目
扇出:一个门的输出可以驱动 的标准门个数
功耗:逻辑门消耗的能量,以热的形式散发
……
传输延迟 :从输入传输到输出所需要的时间。电路的处理速度与电路门的最大传输延迟成反比例关系。
最大值和最小值的 50 % 50\% 50%
高到低(t PHL t_{\text{PHL}} t PHL t PLH t_{\text{PLH}} t PLH t Pd = 1 2 ( t PHL + t PLH ) .
t_{\text{Pd}} = \dfrac{1}{2}(t_{\text{PHL}} + t_{\text{PLH}}).
t Pd = 2 1 ( t PHL + t PLH ) .
高到低或低到高跃迁是根据输出关系 定义的,而不是输入关系。
如果是非门,则输出和输入跃迁相反
如果是同相门,则输出和输入跃迁相同
也就是说,看的是输出信号 是从低到高还是从高到低跃迁。
测量传输延迟
t Pd = 1 number of gates ⋅ t Pd 1 + t Pd 2 2 .
t_{\text{Pd}} = \frac{1}{\text{number of gates}} \cdot \frac{t_{\text{Pd}_1} + t_{\text{Pd}_2}}{2}.
t Pd = number of gates 1 ⋅ 2 t Pd 1 + t Pd 2 .
传输延迟的一个应用是自激震荡
最后一个门输出的信号与最先一个门输入的信号相反,则会产生自激震荡。
注意 :自激振荡的周期是 2 t Pd ⋅ number of gates 2t_{\text{Pd}} \cdot \text{number of gates} 2 t Pd ⋅ number of gates
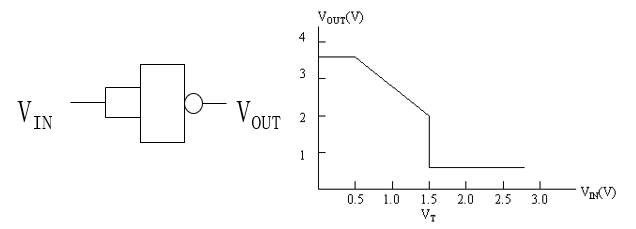
转移特性 :门电路中输出电压随输入电压的变化特性。
V_IN-V_OUT关系曲线 在曲线上 V OUT V_{\text{OUT}} V OUT V IN V_{\text{IN}} V IN V T V_{\text{T}} V T
直流参数 :
输入端 输入电流 输出电流 输出电压
0 0 0 I IL ≤ 1.6 m A I_{\text{IL}} \le 1.6\;\mathrm{mA} I IL ≤ 1.6 mA I OH ≤ 0.4 m A I_{\text{OH}} \le 0.4\;\mathrm{mA} I OH ≤ 0.4 mA V OH ≥ 3 V V_{\text{OH}} \ge 3\;\mathrm{V} V OH ≥ 3 V 1 1 1 I IH ≤ 40 μ A I_{\text{IH}} \le 40\;\mathrm{\mu A} I IH ≤ 40 μ A I OL ≤ 16 m A I_{\text{OL}} \le 16\;\mathrm{mA} I OL ≤ 16 mA V OL ≤ 0.35 V V_{\text{OL}} \le 0.35\;\mathrm{V} V OL ≤ 0.35 V
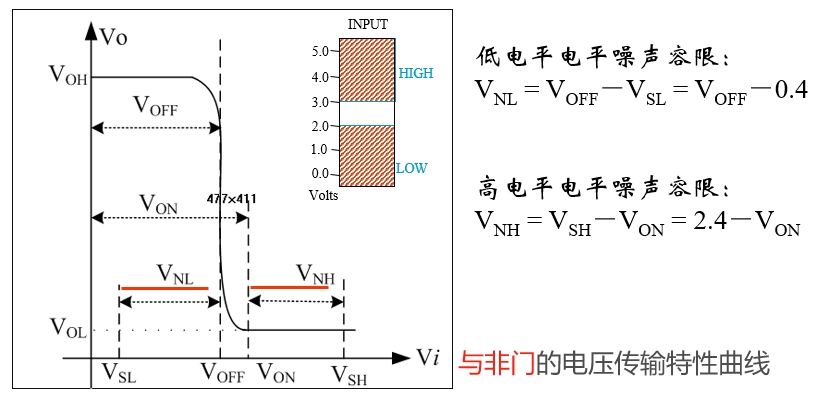
噪音容限 :在前一级输出为最坏的情况下,为保证后一级正常工作,所允许的最大噪声幅度。噪音容限时叠加到正常输入值的最大的外部噪音电压,它不会在电路的输出产生不可预料的变化。
与非门的电压传输特性曲线 图中假设 V O = f ( V I ) V_{\text{O}} = f(V_{\text{I}}) V O = f ( V I ) V ON V_{\text{ON}} V ON V OFF V_{\text{OFF}} V OFF V NL = V OFF − f ( V ON ) , V NH = f ( V OFF ) − V ON .
\begin{align*}
V_{\text{NL}} = V_{\text{OFF}} - f(V_{\text{ON}}), \\
V_{\text{NH}} = f(V_{\text{OFF}}) - V_{\text{ON}}.
\end{align*}
V NL = V OFF − f ( V ON ) , V NH = f ( V OFF ) − V ON . V NL V_{\text{NL}} V NL L \text{L} L V NH V_{\text{NH}} V NH H \text{H} H
TTL 与非门电路的级联
级联 :前一个器件的输出就是后一个器件的输入,后一个是前一个的负载,两者要相互影响。
负载计算 :
I OH = N ⋅ I IH , I OL = N ⋅ I IL .
\begin{align*}
I_{\text{OH}} = N \cdot I_{\text{IH}}, \\
I_{\text{OL}} = N \cdot I_{\text{IL}}.
\end{align*}
I OH = N ⋅ I IH , I OL = N ⋅ I IL . 低电平变高,高电平变低 。
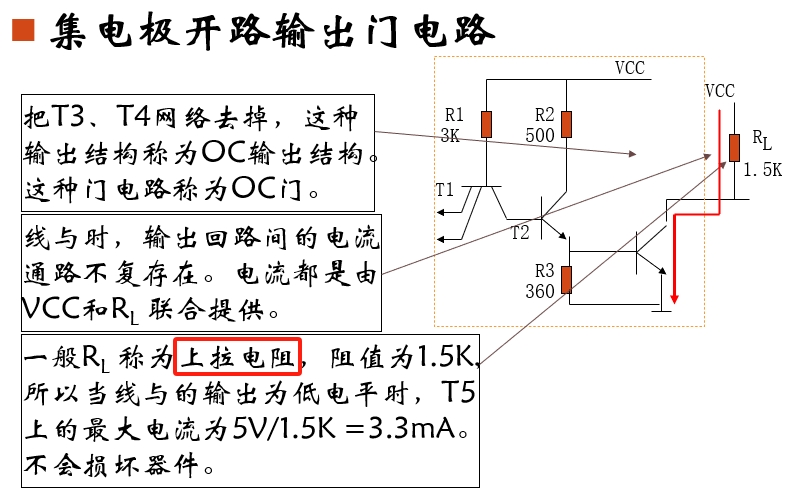
集电极开路(OC)与非门
线与逻辑 :两个输出端(包括两个以上)直接互连就可以实现逻辑与的逻辑功能。
普通与非门线与的问题
普通与非门不能直接线与在一起,因为 Totem 输出结构的电路,是不能把它们的输出线与在一起的。
否则,当一门电路的输出为 H H H L L L H H H L L L
集电极开路输出(OC)与非门
OC 与非门 缺点:由于 OC 门输出不是 Totem 结构,电路的上升延迟很大。
T5 退饱和很慢。
对输出负载的充电电流只能通过外接的 R L R_{\text{L}} R L
采用 OC 门只适合速度较慢的电路,对于速度要求较快(例如 CPU 的数据总线),就不能使用 OC 门。
注意 :OC 门不可以 和普通与非门实现线与。
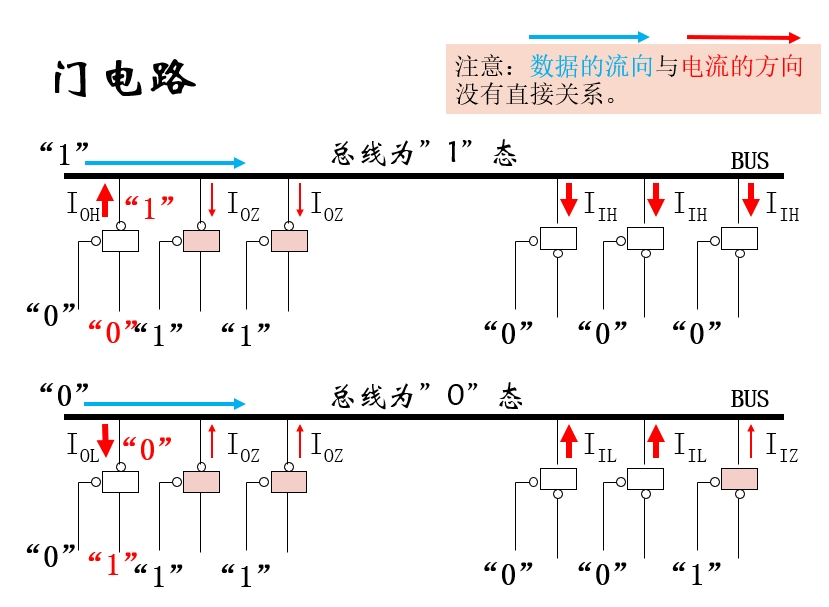
三态门
特点 :
三态门电路既保留了 Totem 输出结构,又具有 OC 门输出可以“线与”的特点
完成“线与”逻辑的速度较快
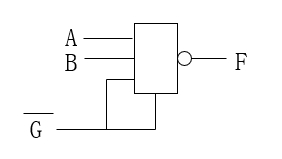
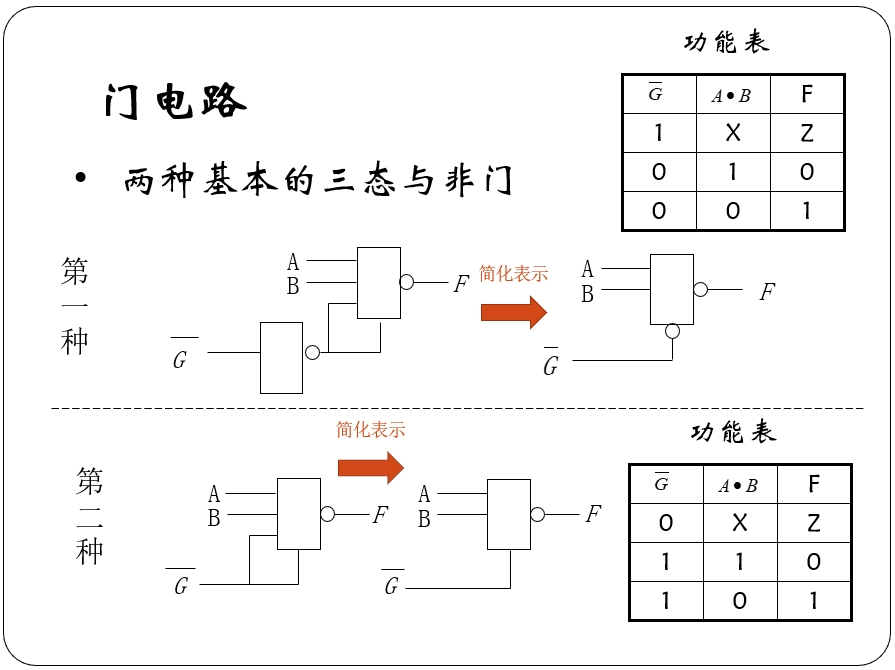
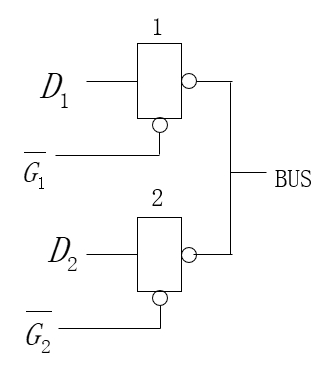
三态门 功能表 :
注意 :这里的 G ‾ \overline{G} G G G G
A A A B B B G ‾ \overline{G} G F F F
- - 0 0 0 Z \text{Z} Z 0 0 0 0 0 0 1 1 1 1 1 1 1 1 1 0 0 0 1 1 1 1 1 1 0 0 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 0 0
值得注意的是,三态门有不止一种画法,不同的三态门的功能表并不相同;但它们的共同点是,从侧面输入 的信号如果为 0 0 0
例如下面的第一种三态门,G ‾ = 1 \overline{G} = 1 G = 1 0 0 0
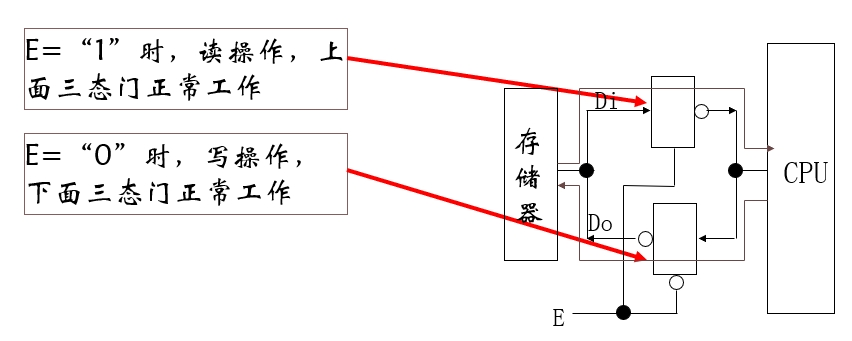
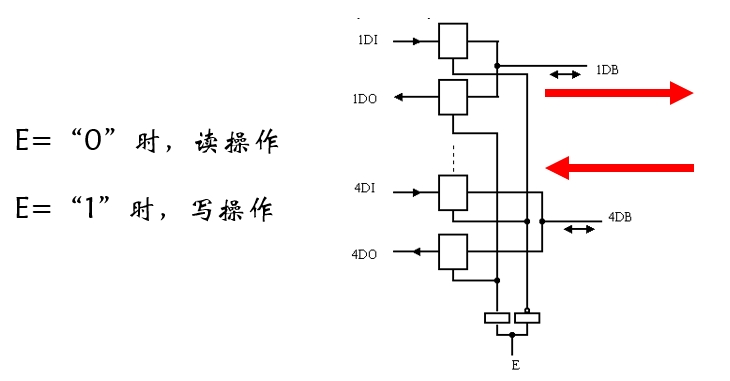
两种基本的三态与非门 应用 :
注意 :三态门在保证控制信号符合三态门要求的情况下可以线与,其他情况均不可以线与。
触发器
触发器是一种存储 1 位二进制数的记忆元件,英文缩写为 FF(Flip-flop)。
触发器可以按照触发(时钟控制)方式分类,也可以按照功能分类。
按时钟控制分类 :
电位触发(Level Trigger)方式 FF
边沿触发(Edge Trigger)方式 FF
主-从触发(Master-slave,或称为 Pulse Trigger)方式 FF
按功能分类 :
D 触发器(Delay)
R-S 触发器(Reset-set)
J-K 触发器
T 触发器(Toggle)
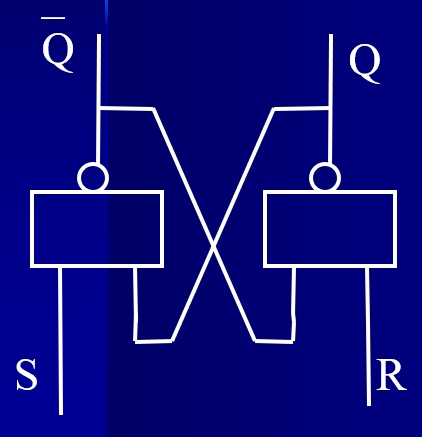
基本 R-S 触发器
基本组成
R-S 触发器有两个输入端 R , S R, S R , S Q , Q ‾ Q, \overline{Q} Q , Q Q Q Q Q ‾ \overline{Q} Q
一般规定用 Q Q Q
若 Q = 0 , Q ‾ = 1 Q = 0, \overline{Q} = 1 Q = 0 , Q = 1 置位 状态。
若 Q = 1 , Q ‾ = 0 Q = 1, \overline{Q} = 0 Q = 1 , Q = 0 复位 状态。
一般称 S S S R R R
实质上,与非门构成的触发器的状态变化,是由在输入端引入“0”引起的。
若 S = R = 1 S = R = 1 S = R = 1 Q = Q ‾ = 1 Q = \overline{Q} = 1 Q = Q = 1 Q Q Q Q ‾ \overline{Q} Q 既不表示“1”状态,也不表示“0”状态 。
注意 :此时当 S , R S, R S , R
正常工作条件:R ‾ S ‾ = 0 \overline{R}\;\overline{S} = 0 R S = 0
逻辑图
基本 R-S 触发器 功能表
R R R S S S Q Q Q Q ‾ \overline{Q} Q
1 1 1 0 0 0 0 0 0 1 1 1 0 0 0 1 1 1 1 1 1 0 0 0 1 1 1 1 1 1 Q 0 Q_0 Q 0 Q 0 ‾ \overline{Q_0} Q 0 0 0 0 0 0 0 1 ∗ 1^* 1 ∗ 1 ∗ 1^* 1 ∗
注意 :R-S 触发器也有不同的画法,例如将上例中的与非门改为或非门(或是,改为与或非门)。此时,功能表也会有相应的变化。可以通过观察 R = S = 1 R = S = 1 R = S = 1 R = S = 0 R = S = 0 R = S = 0 Q = Q ‾ = 0 Q = \overline{Q} = 0 Q = Q = 0 Q = Q ‾ = 1 Q = \overline{Q} = 1 Q = Q = 1
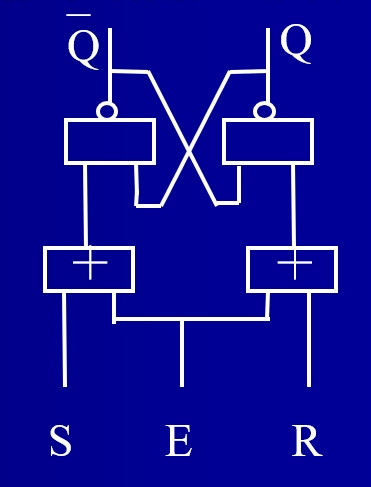
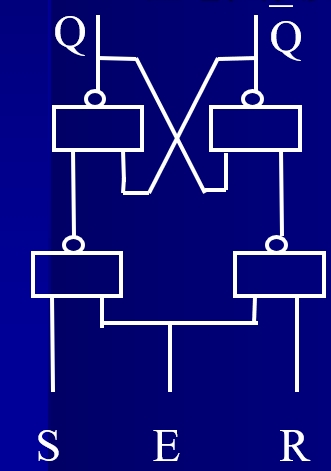
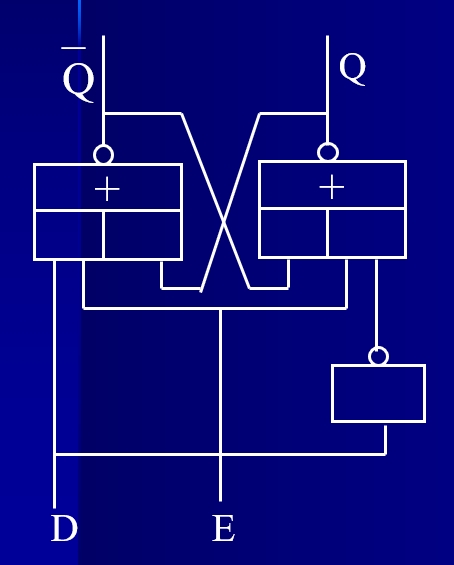
电位触发方式的触发器
当触发器的同步控制信号 E E E
当 E E E
某种电位触发器
此例中,E = 0 E = 0 E = 0
某种电位触发器 功能表:
E E E R R R S S S Q Q Q Q ‾ \overline{Q} Q
1 1 1 - - Q 0 Q_0 Q 0 Q 0 ‾ \overline{Q_0} Q 0 0 0 0 1 1 1 1 1 1 Q 0 Q_0 Q 0 Q 0 ‾ \overline{Q_0} Q 0 0 0 0 0 0 0 1 1 1 1 1 1 0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 1 ∗ 1^* 1 ∗ 1 ∗ 1^* 1 ∗
R-S 型电位触发器
为了保证结构的一致性,增加控制端后构成的 R-S 触发器也全用与非门 。E = 1 E = 1 E = 1
R-S 型电位触发器
注意 :此时 S S S R R R Q Q Q Q ‾ \overline{Q} Q
功能表:
E E E R R R S S S Q Q Q Q ‾ \overline{Q} Q
0 0 0 - - Q 0 Q_0 Q 0 Q 0 ‾ \overline{Q_0} Q 0 1 1 1 0 0 0 0 0 0 Q 0 Q_0 Q 0 Q 0 ‾ \overline{Q_0} Q 0 1 1 1 0 0 0 1 1 1 1 1 1 0 0 0 1 1 1 1 1 1 0 0 0 0 0 0 1 1 1 1 1 1 1 1 1 1 1 1 1 ∗ 1^* 1 ∗ 1 ∗ 1^* 1 ∗
特点:当 E = 0 E = 0 E = 0
问题:当 E R S = 1 ERS = 1 ERS = 1
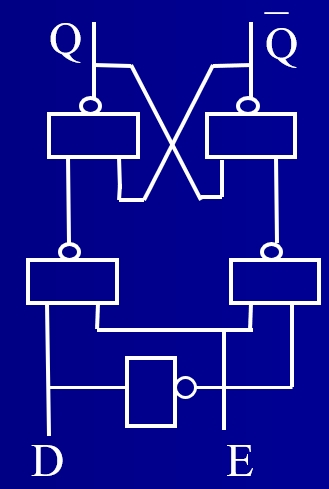
电位型 D 触发器
如何解决 R-S 型电位触发器 E R S = 1 ERS = 1 ERS = 1
分析 :
控制端可以保证状态保持;
当 R ‾ S ‾ = 1 \overline{R}\;\overline{S} = 1 R S = 1
当 R ⊕ S = 1 R \oplus S = 1 R ⊕ S = 1
解决办法 :
控制端控制状态保持;
输入端保证 R ⊕ S = 1 R \oplus S = 1 R ⊕ S = 1
设计 :
R-S 型电位触发器的输入由 R , S R, S R , S
修改后的 R-S 型电位触发器
存在的问题 :从 D D D Q Q Q Q ‾ \overline{Q} Q 四级门延迟 。尽可能减小延迟可以提高触发器的工作速度。
电位型 D 触发器
E = 1 E = 1 E = 1 D D D E = 0 E = 0 E = 0 D D D
注意 :此时 D D D S S S Q Q Q Q ‾ \overline{Q} Q
功能表:
E E E D D D Q Q Q Q ‾ \overline{Q} Q
1 1 1 D D D D D D D ‾ \overline{D} D 0 0 0 - Q 0 Q_0 Q 0 Q 0 ‾ \overline{Q_0} Q 0
特点:
电位型 D 触发器在控制电位 E E E
E = 1 E = 1 E = 1
问题:
抗干扰能力差,容易发生空翻现象。
如何解决?
考虑使用边沿触发方式的触发器:接收使能(时钟)脉冲某一跳变来到时,输出才变化为输入的值。
边沿触发方式的触发器
触发器只有在时钟输入 CP \text{CP} CP ↑ \uparrow ↑ ↓ \downarrow ↓
当 CP \text{CP} CP CP = 0 \text{CP} = 0 CP = 0 CP = 1 \text{CP} = 1 CP = 1
当 CP \text{CP} CP
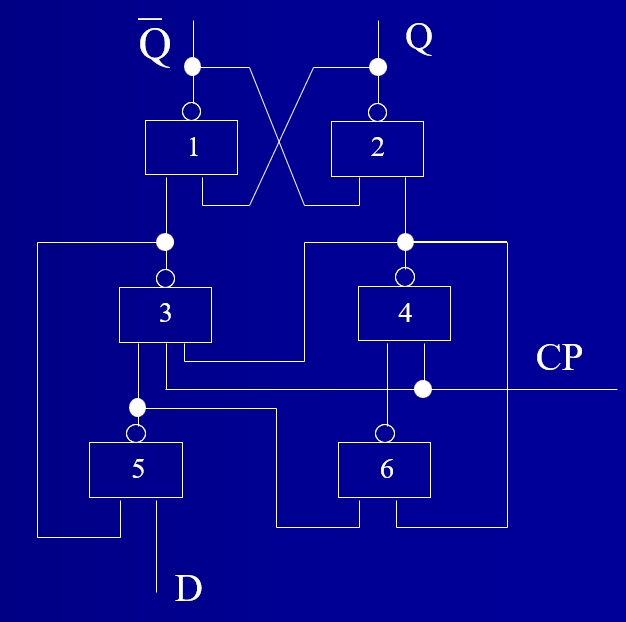
正边沿触发的 D 型触发器
逻辑图:
正边沿触发的 D 型触发器
最左侧线被称为维持“0”阻塞“1”线 ,这是因为若正边沿跳变时有 D = 0 D = 0 D = 0 1 1 1 0 0 0 1 1 1 D D D Q = 0 Q = 0 Q = 0
最右侧线被称为维持“1”阻塞“0”线 ,这是因为若正边沿跳变时有 D = 1 D = 1 D = 1 1 1 1 0 0 0 1 1 1 D D D Q = 1 Q = 1 Q = 1
总而言之,时钟正边沿跳变后,在 CP = 1 \text{CP} = 1 CP = 1 Q Q Q D D D D D D
功能表:
CP \text{CP} CP D D D Q Q Q Q ‾ \overline{Q} Q
↑ \uparrow ↑ D D D D D D D ‾ \overline{D} D 0 0 0 1 1 1 ↓ \downarrow ↓ - Q 0 Q_0 Q 0 Q 0 ‾ \overline{Q_0} Q 0
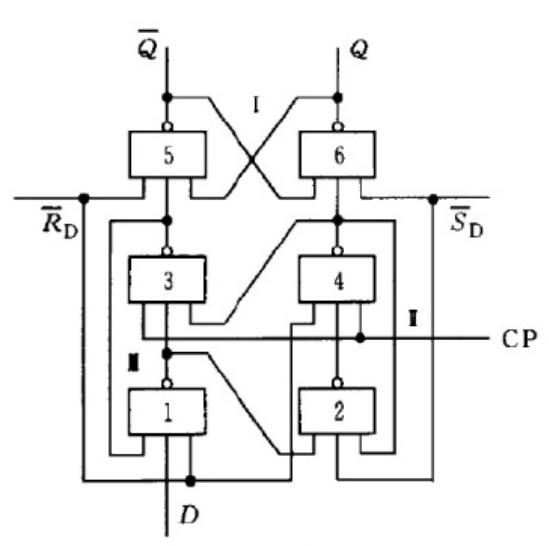
带有异步置位端的正边沿 D 型触发器
带有异步置位端的正边沿 D 型触发器 功能表:
R D ‾ \overline{R_D} R D S D ‾ \overline{S_D} S D CP \text{CP} CP D D D Q Q Q Q ‾ \overline{Q} Q
0 0 0 1 1 1 - - 0 0 0 1 1 1 1 1 1 0 0 0 - - 1 1 1 0 0 0 1 1 1 1 1 1 ↑ \uparrow ↑ 0 0 0 0 0 0 1 1 1 1 1 1 1 1 1 ↑ \uparrow ↑ 1 1 1 1 1 1 0 0 0 1 1 1 1 1 1 0 0 0 1 1 1 ↓ \downarrow ↓ - Q 0 Q_0 Q 0 Q 0 ‾ \overline{Q_0} Q 0
只要 R D ‾ = 0 \overline{R_D} = 0 R D = 0 Q = 0 , Q ‾ = 1 Q = 0, \overline{Q} = 1 Q = 0 , Q = 1 S D ‾ = 0 \overline{S_D} = 0 S D = 0 Q = 1 , Q ‾ = 0 Q = 1, \overline{Q}= 0 Q = 1 , Q = 0
疑问 :如果 R D ‾ \overline{R_D} R D S D ‾ \overline{S_D} S D 0 0 0
解答 :一般它们在工业设计上会控制它们互锁。
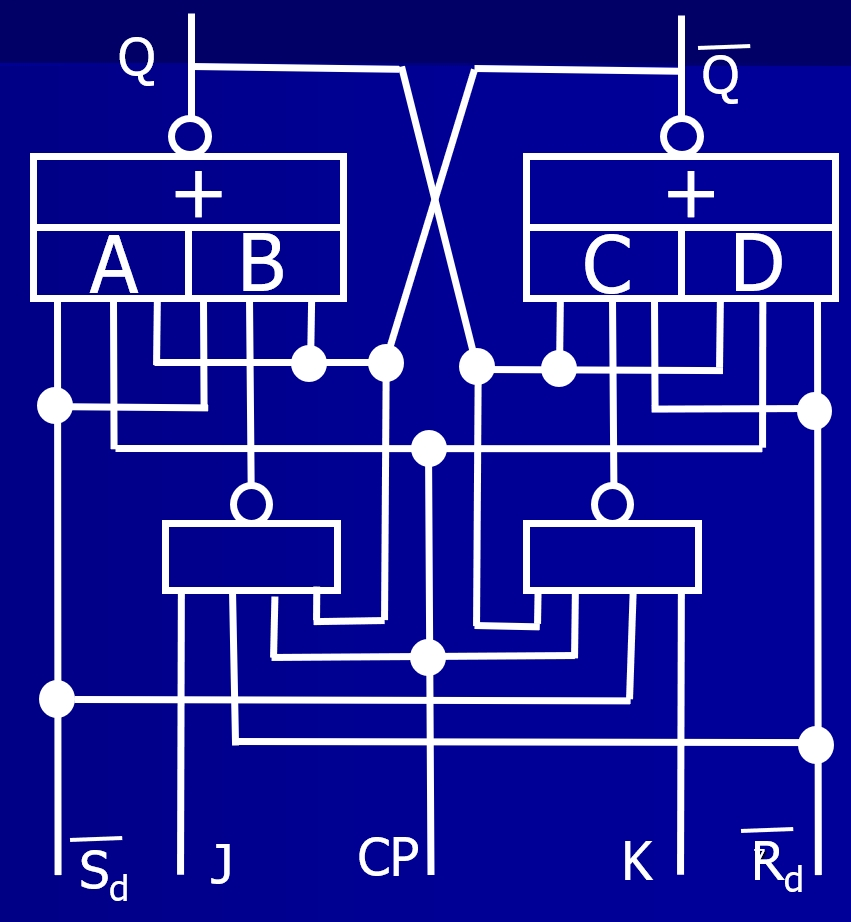
负边沿触发的 J-K 触发器
负边沿 J-K 触发器是利用触发器内部门电路的延迟时间不同 来实现负沿触发的。
负边沿触发的 J-K 触发器 要求:t Pd, nand gate > 2 × t Pd, and-or-not gate t_{\text{Pd, nand gate}} > 2\times t_{\text{Pd, and-or-not gate}} t Pd, nand gate > 2 × t Pd, and-or-not gate 0 0 0 1 1 1 K K K J J J CP \text{CP} CP Q Q Q Q ‾ \overline{Q} Q
功能表:
R D ‾ \overline{R_D} R D S D ‾ \overline{S_D} S D CP \text{CP} CP J J J K K K Q Q Q Q ‾ \overline{Q} Q 功能
0 0 0 1 1 1 - - - 0 0 0 1 1 1 异步清 0 0 0 1 1 1 0 0 0 - - - 1 1 1 0 0 0 异步置 1 1 1 1 1 1 1 1 1 ↓ \downarrow ↓ 0 0 0 1 1 1 0 0 0 1 1 1 置 0 0 0 1 1 1 1 1 1 ↓ \downarrow ↓ 1 1 1 0 0 0 1 1 1 0 0 0 置 1 1 1 1 1 1 1 1 1 ↓ \downarrow ↓ 0 0 0 0 0 0 Q 0 Q_0 Q 0 Q 0 ‾ \overline{Q_0} Q 0 保持 1 1 1 1 1 1 ↓ \downarrow ↓ 1 1 1 1 1 1 Q 0 ‾ \overline{Q_0} Q 0 Q 0 Q_0 Q 0 翻转 1 1 1 1 1 1 0 0 0 1 1 1 ↑ \uparrow ↑ - - Q 0 Q_0 Q 0 Q 0 ‾ \overline{Q_0} Q 0 保持
电位触发器和边沿触发器间的比较
输入数据
对于电位触发器 ,只要 E E E E E E
因此,若要保持电位触发器状态不变,则输入数据就不应在 E E E E E E
对于边沿触发器 ,为了使数据可靠地被接收,其输入数据必须比使触发器接收数据的约定时钟跳变提前到达数据输入端。
与电位触发器不同,边沿触发器待时钟约定跳变把输入数据送入触发器后,输入数据即可撤除。
数据端的干扰
对于电位触发器 ,在 E E E
对于边沿触发器 ,在 CP = 0 \text{CP} = 0 CP = 0 CP = 1 \text{CP} = 1 CP = 1
“空翻现象”
空翻现象 指的是在时钟脉冲的高电平作用下,触发器的状态发生两次或更多次的翻转。这通常发生在电平触发的情况下,即在时钟脉冲为高电平期间,如果数据输入端连续发生变化,触发器也会随之连续变化,直到时钟脉冲变为低电平才会停止。由于边沿触发器在约定时钟跳变来到后的电平期间,数据的变化是不会被接收的,因此,用边沿触发器组成计数器或移位寄存器时不存在“空翻现象”。
应用场景
对于电位触发器 ,由于“空翻现象”,故只能用来组成寄存器,而不能用作计数器和移位寄存器。
对于边沿触发器 ,不存在“空翻现象”,故除了可用来组成寄存器外,还可用来组成计数器和移位寄存器。
主-从触发方式的触发器(不考)
主-从触发方式的触发器由两级电位触发器 (主触发器和从触发器)串联而成。
当 CP = 1 \text{CP} = 1 CP = 1 输入数据 ,从触发器封锁;
当 CP = 0 \text{CP} = 0 CP = 0 主触发器的输出数据 ,主触发器封锁。
注意,当 CP = 0 \text{CP} = 0 CP = 0 输入数据 。
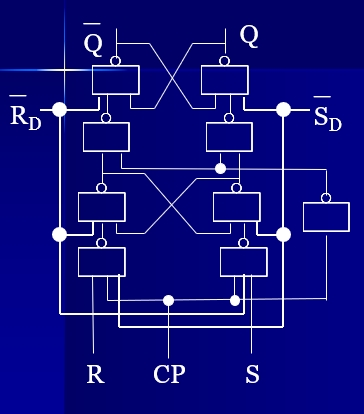
主-从 R-S 触发器
主-从 R-S 触发器 功能表:
R D R_D R D S D S_D S D CP \text{CP} CP R R R S S S Q Q Q Q ‾ \overline{Q} Q
0 0 0 1 1 1 - - - 0 0 0 1 1 1 1 1 1 0 0 0 - - - 1 1 1 0 0 0 1 1 1 1 1 1 → ↑ → ↓ → \underset{\rightarrow}{}\uparrow\overset{\rightarrow}{}\downarrow\underset{\rightarrow}{} → ↑ → ↓ → 1 1 1 0 0 0 0 0 0 1 1 1 1 1 1 1 1 1 → ↑ → ↓ → \underset{\rightarrow}{}\uparrow\overset{\rightarrow}{}\downarrow\underset{\rightarrow}{} → ↑ → ↓ → 0 0 0 1 1 1 1 1 1 0 0 0 1 1 1 1 1 1 → ↑ → ↓ → \underset{\rightarrow}{}\uparrow\overset{\rightarrow}{}\downarrow\underset{\rightarrow}{} → ↑ → ↓ → 0 0 0 0 0 0 Q 0 Q_0 Q 0 Q 0 ‾ \overline{Q_0} Q 0 1 1 1 1 1 1 → ↑ → ↓ → \underset{\rightarrow}{}\uparrow\overset{\rightarrow}{}\downarrow\underset{\rightarrow}{} → ↑ → ↓ → 1 1 1 1 1 1 1 ∗ 1^* 1 ∗ 1 ∗ 1^* 1 ∗
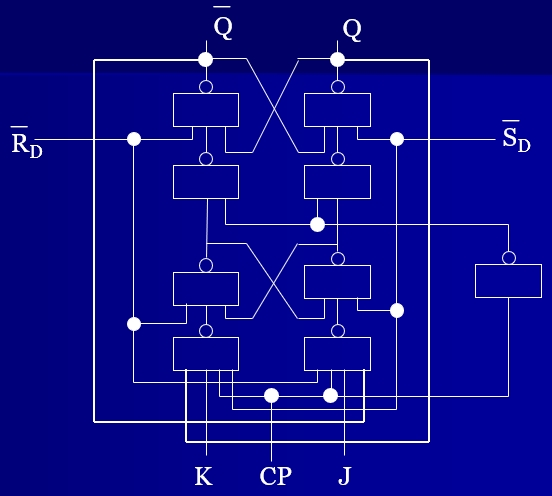
主-从 J-K 触发器
逻辑图:
主-从 J-K 触发器 考虑怎么从主-从 R-S 触发器构造出主-从 J-K 触发器。
功能表:
R D R_D R D S D S_D S D CP \text{CP} CP R R R S S S Q Q Q Q ‾ \overline{Q} Q
0 0 0 1 1 1 - - - 0 0 0 1 1 1 1 1 1 0 0 0 - - - 1 1 1 0 0 0 1 1 1 1 1 1 → ↑ → ↓ → \underset{\rightarrow}{}\uparrow\overset{\rightarrow}{}\downarrow\underset{\rightarrow}{} → ↑ → ↓ → 0 0 0 1 1 1 0 0 0 1 1 1 1 1 1 1 1 1 → ↑ → ↓ → \underset{\rightarrow}{}\uparrow\overset{\rightarrow}{}\downarrow\underset{\rightarrow}{} → ↑ → ↓ → 1 1 1 0 0 0 1 1 1 0 0 0 1 1 1 1 1 1 → ↑ → ↓ → \underset{\rightarrow}{}\uparrow\overset{\rightarrow}{}\downarrow\underset{\rightarrow}{} → ↑ → ↓ → 0 0 0 0 0 0 Q 0 Q_0 Q 0 Q 0 ‾ \overline{Q_0} Q 0 1 1 1 1 1 1 → ↑ → ↓ → \underset{\rightarrow}{}\uparrow\overset{\rightarrow}{}\downarrow\underset{\rightarrow}{} → ↑ → ↓ → 1 1 1 1 1 1 Q 0 ‾ \overline{Q_0} Q 0 Q 0 Q_0 Q 0
注意 :
主-从 J-K 触发器的功能表的前提是,在 CP = 1 \text{CP} = 1 CP = 1 J , K J, K J , K
如果 J , K J, K J , K CP = 1 \text{CP} = 1 CP = 1
主-从 J-K 触发器抗干扰能力差。
graph TD
style Q fill:none,stroke-width:0px
style QQ fill:none,stroke-width:0px
style N1 fill:none,stroke-width:0px
style N2 fill:none,stroke-width:0px
subgraph "J-K 触发器"
Q($$Q$$) --- A("R-S 触发器")
QQ("$$\overline{Q}$$") --- A
A ---|$$R$$| B(某组合)
A ---|$$S$$| B
B --- N1($$J$$)
B --- N2($$K$$)
end
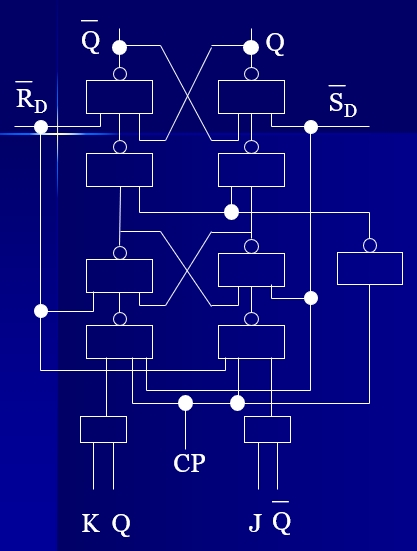
画出 J-K 触发器的 Karnaugh 图如下:
Q 0 \ J K Q_0\backslash JK Q 0 \ J K 00 00 00 01 01 01 11 11 11 10 10 10
0 0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 1 1 1 1 0 0 0 0 0 0 1 1 1
因此 R-S 触发器需要满足(单元格内为对应 R S RS RS
Q 0 \ J K Q_0\backslash JK Q 0 \ J K 00 00 00 01 01 01 11 11 11 10 10 10
0 0 0 X 0 X0 X 0 X 0 X0 X 0 01 01 01 01 01 01 1 1 1 0 X 0X 0 X 10 10 10 10 10 10 0 X 0X 0 X
可以发现:
{ R = K Q , S = J Q ‾ .
\begin{cases}
R & = KQ, \\
S & = J\;\overline{Q}.
\end{cases}
{ R S = K Q , = J Q .
用 R-S 触发器构造的 J-K 触发器
主-从 J-K 触发器和负边沿 J-K 触发器的区别:
主-从 J-K 触发器,主触发器在 CP = 1 \text{CP} = 1 CP = 1 CP = 0 \text{CP} = 0 CP = 0 CP \text{CP} CP
但实际上,负边沿 J-K 触发器在约定时钟跳变(负跳变)到来时,输出反映的是触发器的输入数据 作为输入得到的结果,但主-从 J-K 触发器反映的是主触发器的输出数据 作为从触发器输入得到的结果,并不一定与此时的输入 J , K J, K J , K
主-从 J-K 触发器的时钟配合方式:
触发器功能特点决定了时钟配合方式
使用窄脉宽的CP信号,高电平时间缩短,可以保证 J-K 触发器正常工作
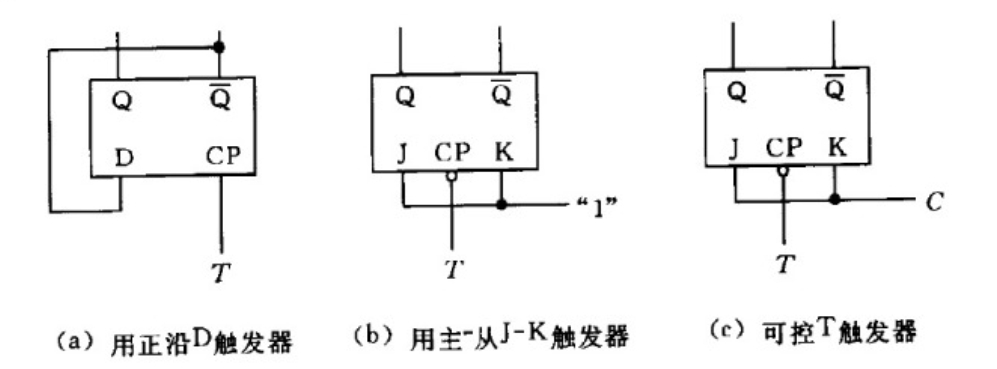
T 触发器
不设数据输入端,只要来一个时钟脉冲,触发器就翻转一次。
T 触发器可由 D 触发器或 J-K 触发器等构成。
T 触发器一般都是边沿触发器 。这是因为如果用电位触发器,当 T = 1 T = 1 T = 1
T 触发器 图中 (c) 为可控 T 触发器,当控制端 C = 1 C = 1 C = 1 C = 0 C = 0 C = 0
触发器的开关特性
注意 :以下以正沿 D 触发器 为例进行说明。负边沿触发器的各个开关特性位于的电平时间与其相反 。
正边沿触发的 D 型触发器 CP \text{CP} CP t Pd CP → Q t_{\text{Pd}_{\text{CP}\to Q}} t Pd CP → Q CP \text{CP} CP t Pd CP → Q t_{\text{Pd}_{\text{CP}\to Q}} t Pd CP → Q Q Q Q
t Pd CP → Q t_{\text{Pd}_{\text{CP}\to Q}} t Pd CP → Q 高电平 期间。
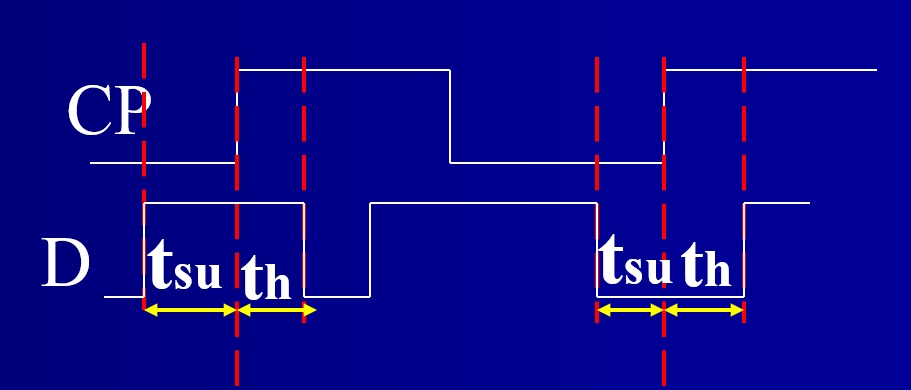
数据建立(setup)时间 t su t_{\text{su}} t su
在 CP \text{CP} CP t su ≥ t Pd 5 + t Pd 6 .
t_{\text{su}} \ge t_{\text{Pd}_5} + t_{\text{Pd}_6}.
t su ≥ t Pd 5 + t Pd 6 .
t su t_{\text{su}} t su 低电平 期间。
数据保持(hold)时间 t h t_{\text{h}} t h
在 CP \text{CP} CP
若 D = 0 D = 0 D = 0 D D D
若 D = 1 D = 1 D = 1 D D D
因此必须有:
t h ≥ max { t Pd 3 , t Pd 4 } .
t_{\text{h}} \ge \max\{t_{\text{Pd}_3}, t_{\text{Pd}_4}\}.
t h ≥ max { t Pd 3 , t Pd 4 } .
t h t_{\text{h}} t h 高电平 期间。
数据建立时间和数据保持时间 最高时钟工作频率 f max CP f_{\max_{\text{CP}}} f m a x CP
触发器的最短时钟正周期 T min CP + T_{\min_\text{CP}}^{+} T m i n CP + T min CP − T_{\min_\text{CP}}^{-} T m i n CP − T min CP + = max { t h , t Pd CP → Q } , T min CP − = t su .
\begin{align*}
T_{\min_\text{CP}}^{+} & = \max\{t_{\text{h}}, t_{\text{Pd}_{\text{CP}\to Q}}\}, \\
T_{\min_\text{CP}}^{-} & = t_{\text{su}}.
\end{align*}
T m i n CP + T m i n CP − = max { t h , t Pd CP → Q } , = t su . f max CP f_{\max_{\text{CP}}} f m a x CP f max CP = 1 T min CP = 1 T min CP + + T min CP − = 1 max { t h , t Pd CP → Q } + t su .
f_{\max_{\text{CP}}} = \dfrac{1}{T_{\min_\text{CP}}} = \dfrac{1}{T_{\min_\text{CP}^+} + T_{\min_\text{CP}}^-} = \dfrac{1}{\max\{t_{\text{h}}, t_{\text{Pd}_{\text{CP}\to Q}}\} + t_{\text{su}}}.
f m a x CP = T m i n CP 1 = T m i n CP + + T m i n CP − 1 = max { t h , t Pd CP → Q } + t su 1 . f max CP f_{\max_{\text{CP}}} f m a x CP 触发器的 最高时钟频率,而不是系统的 最高工作频率。
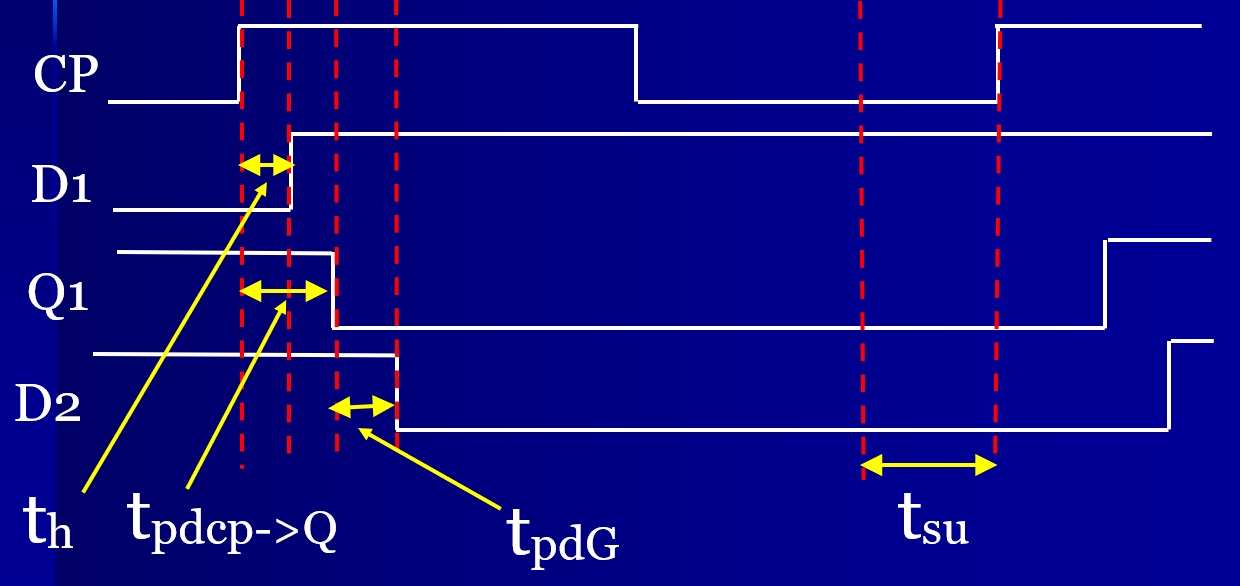
如果在两个触发器间加入控制门,引入信号传输延迟 t Pd G t_{\text{Pd}_G} t Pd G t Pd G t_{\text{Pd}_G} t Pd G 跨高电平或低电平 。此时最短时钟正周期为
T min C P + = max { t h , t Pd CP → Q + t Pd G } .
T_{\min_{CP}}^+ = \max\{t_{\text{h}}, t_{\text{Pd}_{\text{CP}\to Q}} + t_{\text{Pd}_G}\}.
T m i n CP + = max { t h , t Pd CP → Q + t Pd G } . 系统的 最高工作频率:
f max CP = 1 T min CP = 1 T min CP + + T min CP − = 1 max { t h , t Pd CP → Q + t Pd G } + t su .
f_{\max_{\text{CP}}} = \dfrac{1}{T_{\min_\text{CP}}} = \dfrac{1}{T_{\min_\text{CP}^+} + T_{\min_\text{CP}}^-} = \dfrac{1}{\max\{t_{\text{h}}, t_{\text{Pd}_{\text{CP}\to Q}} + t_{\text{Pd}_G}\} + t_{\text{su}}}.
f m a x CP = T m i n CP 1 = T m i n CP + + T m i n CP − 1 = max { t h , t Pd CP → Q + t Pd G } + t su 1 . 引入信号传输延迟
第 4 章 组合逻辑电路 译码器 功能分类
变量译码器:用来表示变量状态的全部组合
N N N 2 N 2^N 2 N
码制译码器:如 8421 码变换为循环码
显示译码器:控制数码管显示
2-4 变量译码器
变量译码器的原理
假设 A , B A, B A , B A A A B B B Y 0 ∼ Y 3 Y_0 \sim Y_3 Y 0 ∼ Y 3 Y 0 = A ‾ B ‾ ‾ , Y 1 = A B ‾ ‾ , Y 2 = A ‾ B ‾ , Y 3 = A B ‾ .
\begin{align*}
Y_0 & = \overline{\overline{A}\;\overline{B}}, \\
Y_1 & = \overline{A\;\overline{B}}, \\
Y_2 & = \overline{\overline{A}\;B}, \\
Y_3 & = \overline{AB}.
\end{align*}
Y 0 Y 1 Y 2 Y 3 = A B , = A B , = A B , = A B . Y i = 0 , Y j = 1 ( j ≠ i ) Y_i = 0, Y_j = 1(j \neq i) Y i = 0 , Y j = 1 ( j = i ) ( B A ) 2 = i (BA)_2 = i ( B A ) 2 = i
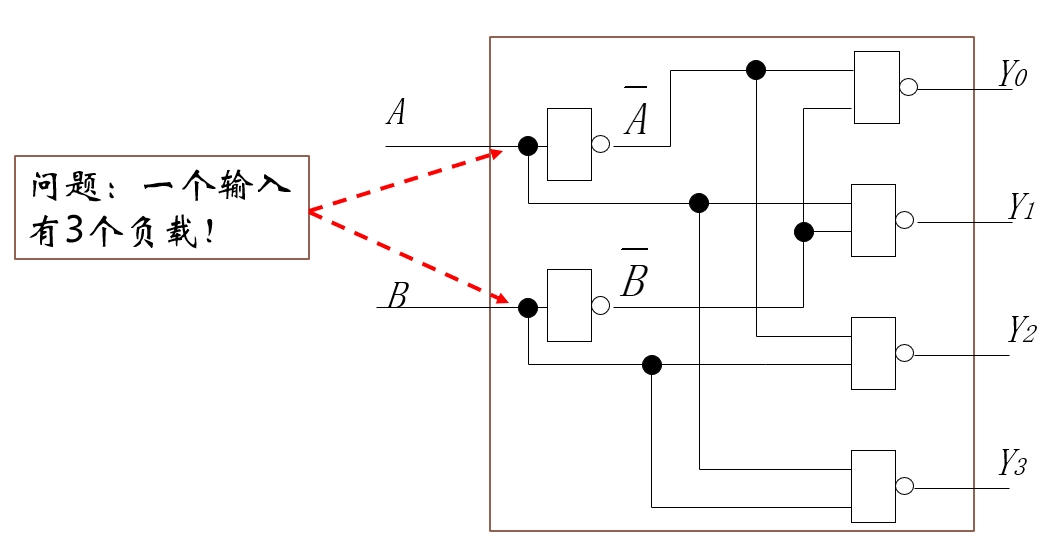
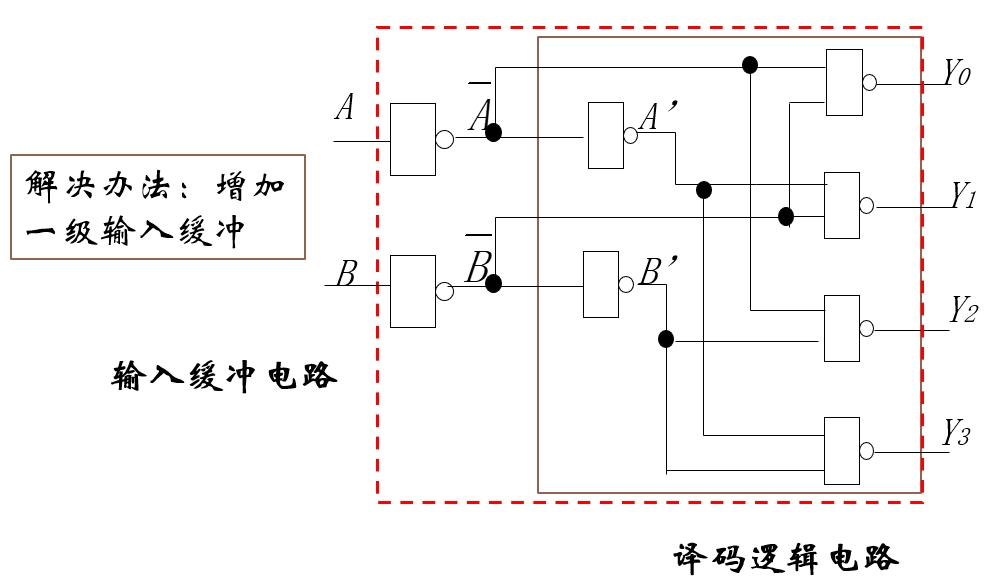
输入的负载过多 为了减轻前一级电路驱动 A , B A, B A , B A , B A, B A , B A A A A ‾ \overline{A} A B B B B ‾ \overline{B} B
添加输入缓冲部分 使能端
可以添加一个“使能”端 E ‾ \overline{E} E E ‾ = 1 \overline{E} = 1 E = 1 1 1 1 E ‾ = 0 \overline{E} = 0 E = 0
注意 :与 G ‾ \overline{G} G E ‾ \overline{E} E E E E
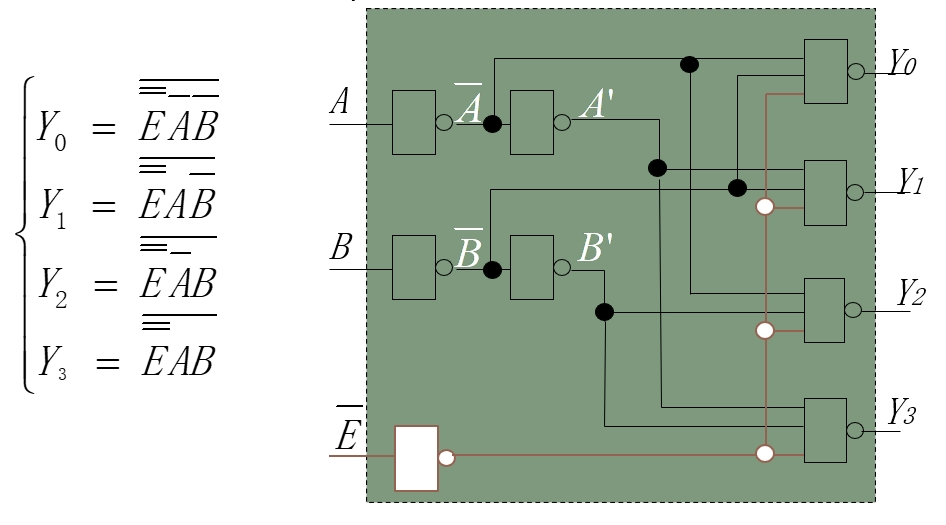
有使能端的 2-4 译码器
用于多片扩展
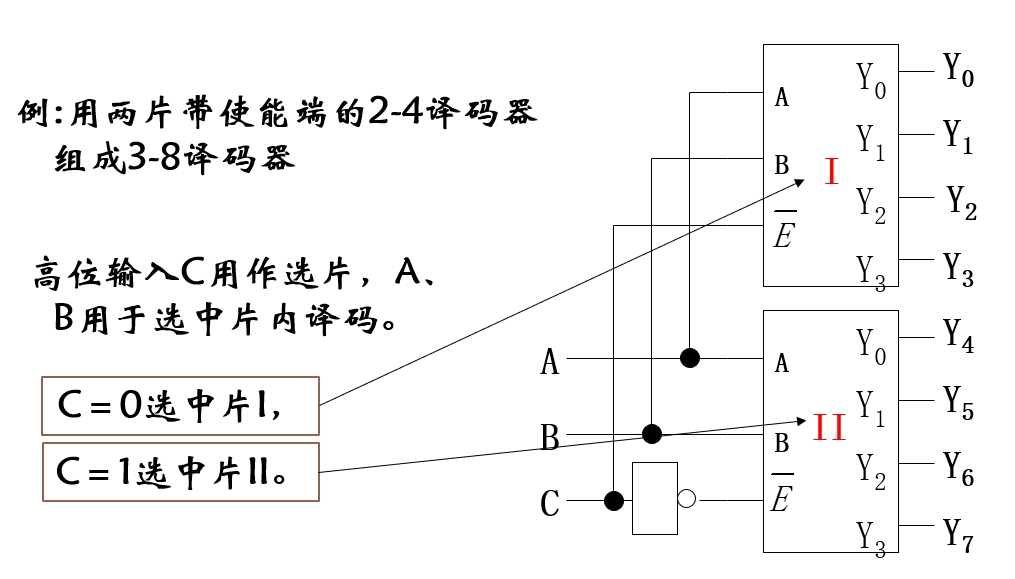
搭建 3-8 译码器需要 2 片 2-4 译码器
用两片带使能端的 2-4 译码器组成 3-8 译码器
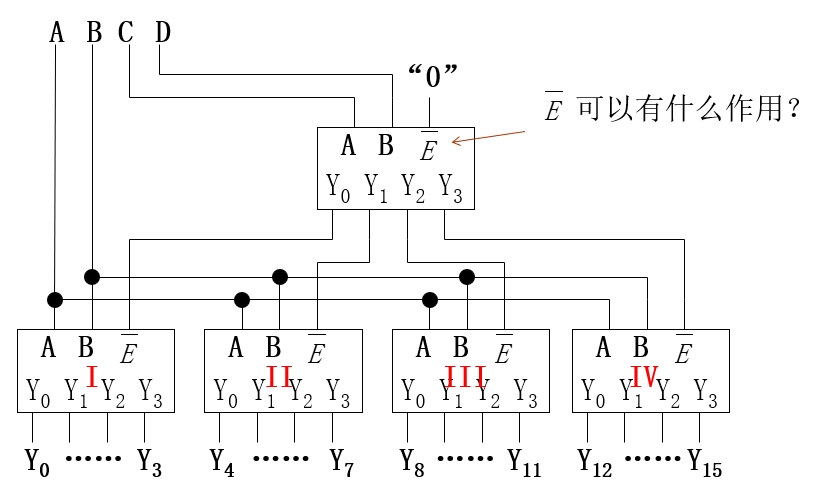
搭建 4-16 译码器需要 5 片 2-4 译码器
用五片带使能端的 2-4 译码器组成 4-16 译码器 其中有一片的使能端 E ‾ \overline{E} E
本质上是进行在 4 4 4
如何搭建 32-2^{32} 译码器?
用作选通:解决门电路的传输延迟造成的竞争、冒险问题
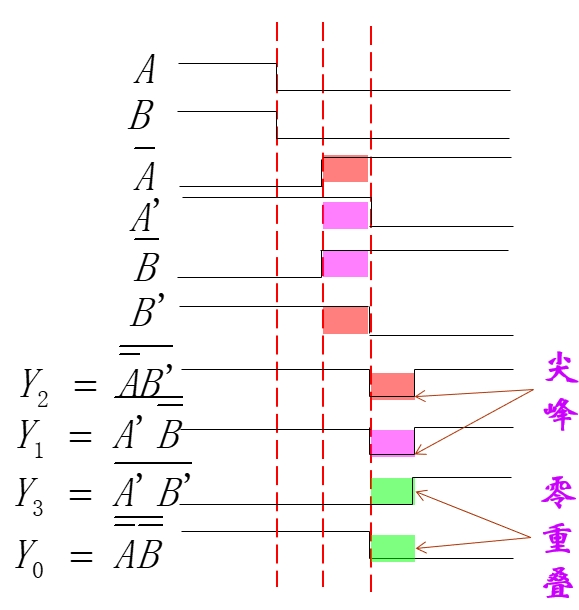
尖峰 :
由于缓冲与非门有延迟导致 A ‾ \overline{A} A A A A A ( 1 → 0 ) A(1 \to 0) A ( 1 → 0 ) A A ‾ A\;\overline{A} A A A ‾ \overline{A} A 1 1 1 A A ‾ = 1 A\;\overline{A} = 1 A A = 1
零重叠 :
两次缓冲导致的与非门 A ′ = A ‾ ‾ A' = \overline{\overline{A}} A ′ = A A A A A ′ B ′ ‾ \overline{A'B'} A ′ B ′ A ‾ B ‾ ‾ \overline{\overline{A}\;\overline{B}} A B 0 0 0
尖峰与零重叠 如果两输入信号 A , B A, B A , B
因此,需要使能端 E ‾ \overline{E} E E ‾ = 1 \overline{E} = 1 E = 1 A , B A, B A , B Y 0 ∼ Y 3 Y_0 \sim Y_3 Y 0 ∼ Y 3 1 1 1 1 1 1
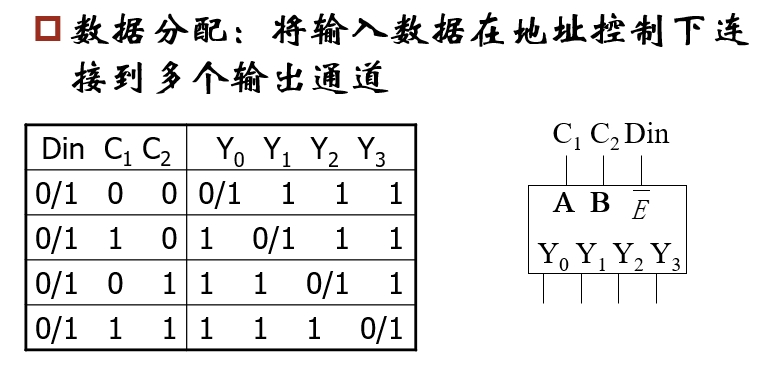
用作数据分配器
E ‾ \overline{E} E C 1 C_1 C 1 C 2 C_2 C 2 0 0 0 1 1 1 译码器用作数据分配器
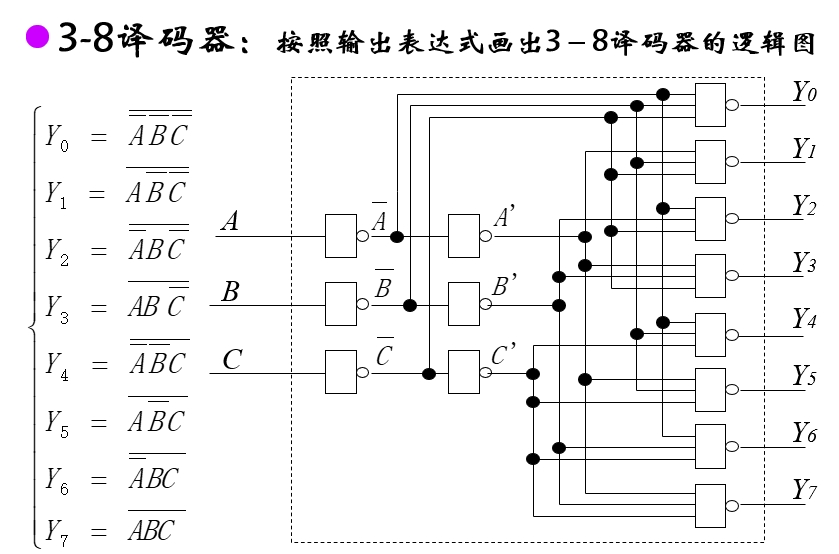
3-8 变量译码器
无使能端的 3-8 译码器
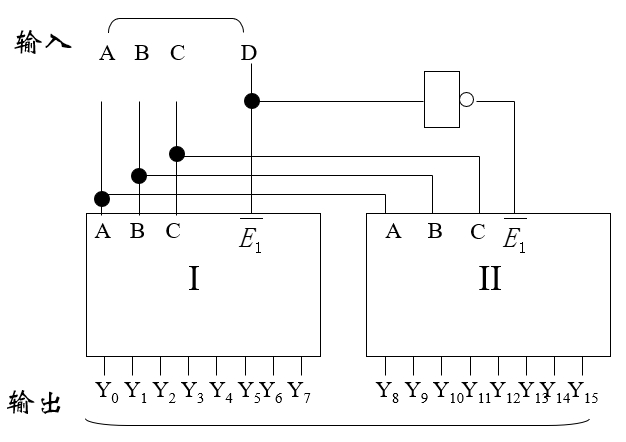
用无使能端的 3-8 译码器扩展成 4-16 译码器
用无使能端的 3-8 译码器扩展成 4-16 译码器
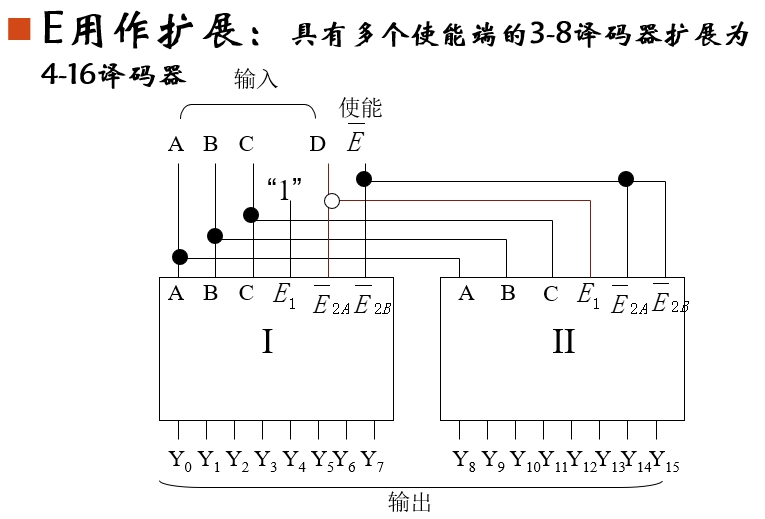
具有多个使能端的 3-8 译码器扩展成 4-16 译码器
多使能端 E 1 , E ‾ 2 A , E ‾ 2 B E_1, \overline{E}_{2A}, \overline{E}_{2B} E 1 , E 2 A , E 2 B
当 E 1 = 1 E_1 = 1 E 1 = 1 E ‾ 2 A = E ‾ 2 B = 0 \overline{E}_{2A} = \overline{E}_{2B} = 0 E 2 A = E 2 B = 0
当 E 1 = 0 E_1 = 0 E 1 = 0 E ‾ 2 A = 1 \overline{E}_{2A} = 1 E 2 A = 1 E ‾ 2 B = 1 \overline{E}_{2B} = 1 E 2 B = 1
具有多个使能端的 3-8 译码器扩展成 4-16 译码器 上图中,本质上是通过 D D D E ‾ 2 A \overline{E}_{2A} E 2 A E 1 E_1 E 1 E 1 E_1 E 1 E ‾ 2 A \overline{E}_{2A} E 2 A
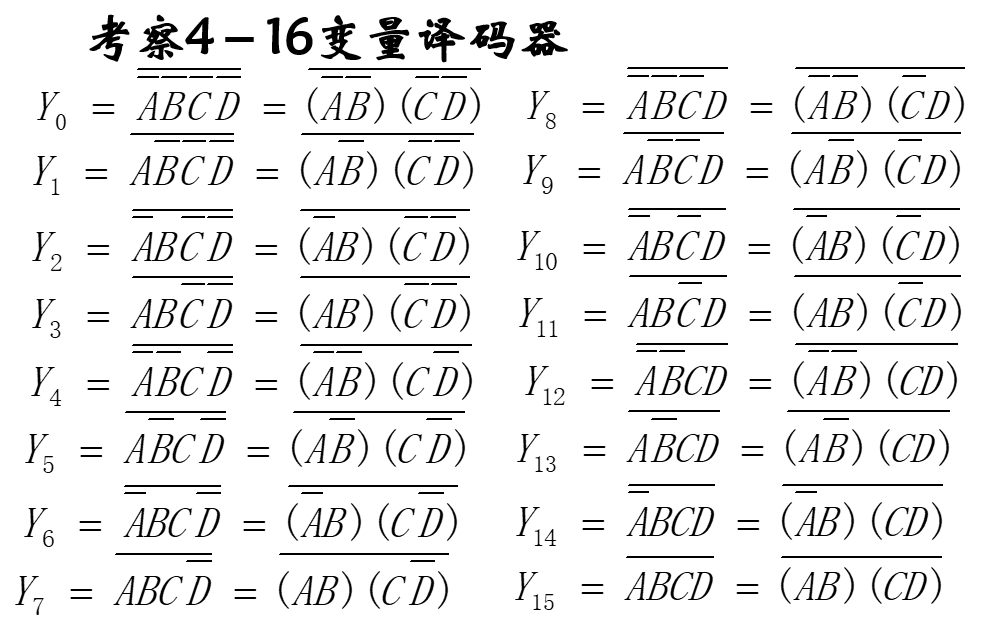
4-16 变量译码器
多使能端 E ‾ 1 , E ‾ 2 \overline{E}_1, \overline{E}_2 E 1 , E 2
当 E ‾ 1 = E ‾ 2 = 0 \overline{E}_1 = \overline{E}_2 = 0 E 1 = E 2 = 0
当 E ‾ 1 = 1 \overline{E}_1 = 1 E 1 = 1 E ‾ 2 = 1 \overline{E}_2 = 1 E 2 = 1
具有多个使能端的 4-16 译码器 存在的问题 :
缓冲门的负载较大:
第一级缓冲门(反变量)负载 9 9 9 8 8 8
使能端与门的负载有 16 16 16
当译码器的输入变量数 N N N
译码部分与非门的输入端数会增多
每个与非门的输入端数均为 N + 1 N+1 N + 1
二级缓冲的每个输出负载加重
负载:第一级为 2 N − 1 + 1 2^{N-1}+1 2 N − 1 + 1 2 N − 1 2^{N-1} 2 N − 1 2 N 2^{N} 2 N N = 11 N = 11 N = 11
原变量和反变量应该各占 2 N 2^{N} 2 N 2 N − 1 + 1 2^{N-1}+1 2 N − 1 + 1
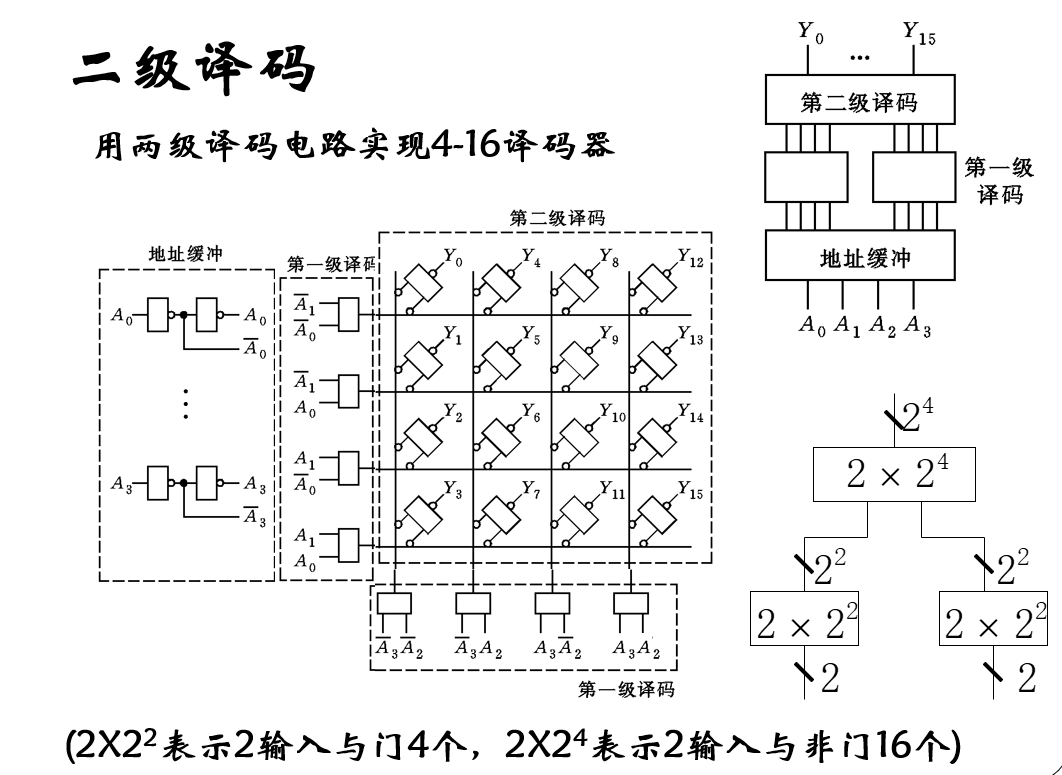
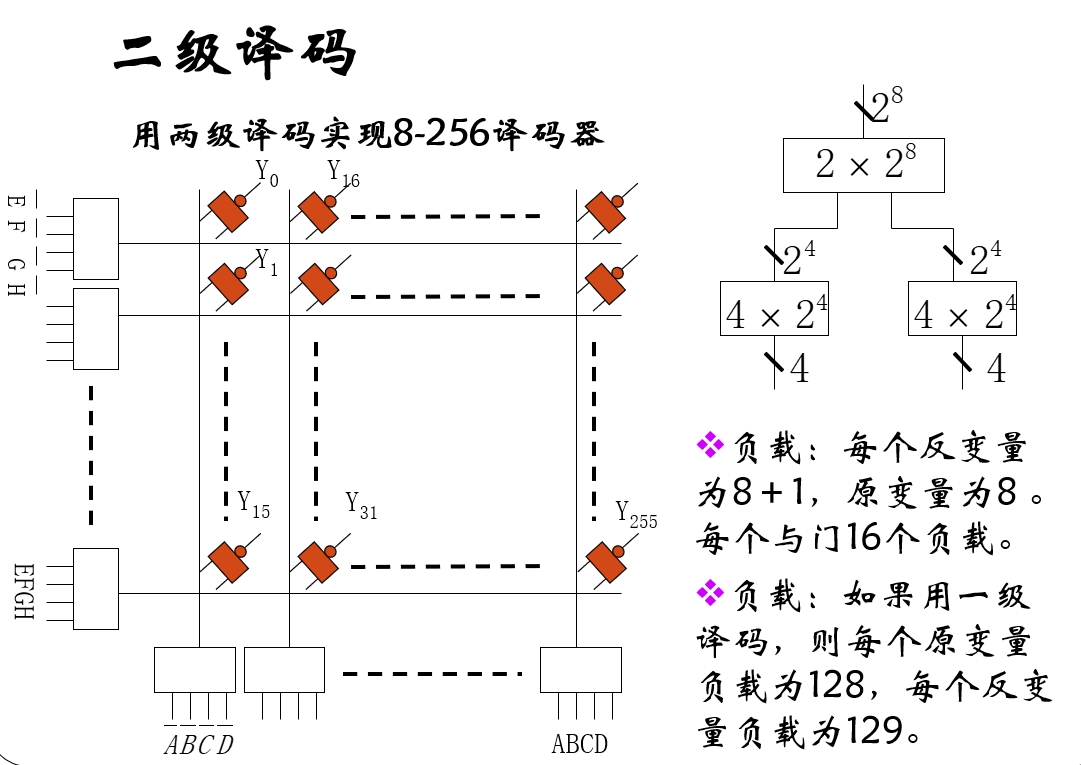
采用多级译码技术可以减少负载:用在大容量存储器片内的译码结构。
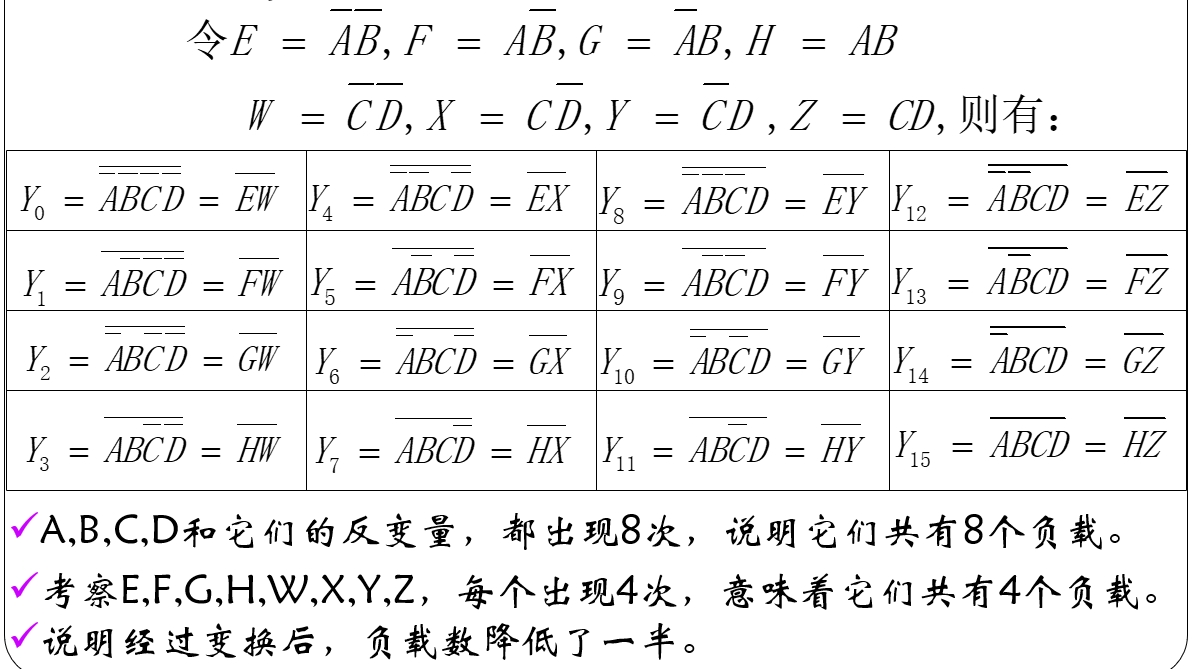
多级译码
采用“中间变量”的方式来减少负载。
多级译码-1 多级译码-2 多级译码-3 多级译码-4 码制译码器
码制译码器是一种将一种编码变换为另外一种编码的逻辑电路。
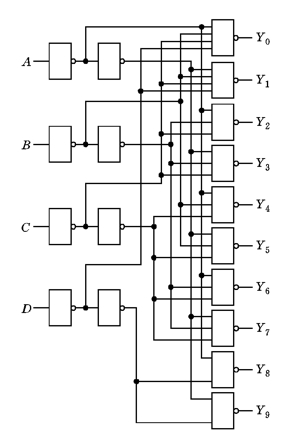
不完全译码的 BCD 译码器
当输入 A B C D ABCD A BC D 0101 ∼ 1111 0101 \sim 1111 0101 ∼ 1111 Y 0 ∼ Y 9 Y_0 \sim Y_9 Y 0 ∼ Y 9
画包含任意项的 Karnaugh 图可以得到:
Y 0 = A ‾ B ‾ C ‾ D ‾ ‾ , Y 1 = A B ‾ C ‾ D ‾ ‾ , Y 2 = A ‾ B C ‾ ‾ , Y 3 = A B C ‾ ‾ , Y 4 = A ‾ B ‾ C ‾ , Y 5 = A B ‾ C ‾ , Y 6 = A ‾ B C ‾ , Y 7 = A B C ‾ , Y 8 = A ‾ D ‾ ‾ , Y 9 = A D ‾ .
\begin{align*}
Y_0 & = \overline{\overline{A}\;\overline{B}\;\overline{C}\;\overline{D}}, \\
Y_1 & = \overline{A\;\overline{B}\;\overline{C}\;\overline{D}}, \\
Y_2 & = \overline{\overline{A}\;B\;\overline{C}}, \\
Y_3 & = \overline{A\;B\;\overline{C}}, \\
Y_4 & = \overline{\overline{A}\;\overline{B}\;C}, \\
Y_5 & = \overline{A\;\overline{B}\;C}, \\
Y_6 & = \overline{\overline{A}\;B\;C}, \\
Y_7 & = \overline{A\;B\;C}, \\
Y_8 & = \overline{\overline{A}\;\overline{D}}, \\
Y_9 & = \overline{A\;D}.
\end{align*}
Y 0 Y 1 Y 2 Y 3 Y 4 Y 5 Y 6 Y 7 Y 8 Y 9 = A B C D , = A B C D , = A B C , = A B C , = A B C , = A B C , = A B C , = A B C , = A D , = A D .
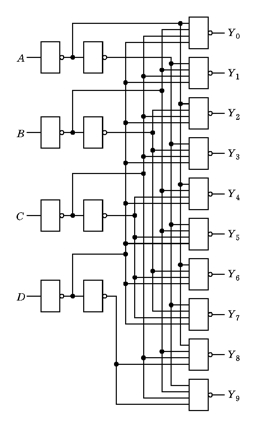
不完全译码的 BCD 译码器 完全译码的 BCD 译码器
当输入 A B C D ABCD A BC D 0101 ∼ 1111 0101 \sim 1111 0101 ∼ 1111 Y 0 ∼ Y 9 Y_0 \sim Y_9 Y 0 ∼ Y 9 1 1 1
画 Karnaugh 图可以得到:
Y 0 = A ‾ B ‾ C ‾ D ‾ ‾ , Y 1 = A B ‾ C ‾ D ‾ ‾ , Y 2 = A ‾ B C ‾ D ‾ ‾ , Y 3 = A B C ‾ D ‾ ‾ , Y 4 = A ‾ B ‾ C D ‾ ‾ , Y 5 = A B ‾ C D ‾ ‾ , Y 6 = A ‾ B C D ‾ ‾ , Y 7 = A B C D ‾ ‾ , Y 8 = A ‾ B ‾ C ‾ D ‾ , Y 9 = A B ‾ C ‾ D ‾ .
\begin{align*}
Y_0 & = \overline{\overline{A}\;\overline{B}\;\overline{C}\;\overline{D}}, \\
Y_1 & = \overline{A\;\overline{B}\;\overline{C}\;\overline{D}}, \\
Y_2 & = \overline{\overline{A}\;B\;\overline{C}\;\overline{D}}, \\
Y_3 & = \overline{A\;B\;\overline{C}\;\overline{D}}, \\
Y_4 & = \overline{\overline{A}\;\overline{B}\;C\;\overline{D}}, \\
Y_5 & = \overline{A\;\overline{B}\;C\;\overline{D}}, \\
Y_6 & = \overline{\overline{A}\;B\;C\;\overline{D}}, \\
Y_7 & = \overline{A\;B\;C\;\overline{D}}, \\
Y_8 & = \overline{\overline{A}\;\overline{B}\;\overline{C}\;D}, \\
Y_9 & = \overline{A\;\overline{B}\;\overline{C}\;D}.
\end{align*}
Y 0 Y 1 Y 2 Y 3 Y 4 Y 5 Y 6 Y 7 Y 8 Y 9 = A B C D , = A B C D , = A B C D , = A B C D , = A B C D , = A B C D , = A B C D , = A B C D , = A B C D , = A B C D .
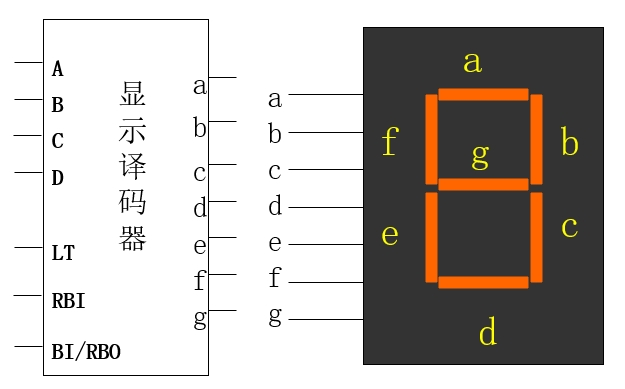
完全译码的 BCD 译码器 显示译码器
七段数码管
一个七段数码管有 7 7 7 a ∼ g a\sim g a ∼ g 7 7 7 8 8 8
共阳极显示:低电平(0 0 0 1 1 1
共阴极显示:高电平亮,低电平灭
注意 :本博客遵循教材和 PPT 的习惯,采用共阳极显示数码管 。
显示译码器
显示译码器本质上是一个 BCD 码到一个特殊的七进制数码管编码的码制译码器。
显示译码器 各个变量的逻辑表达式:
a = B D + A ‾ C + A B ‾ C ‾ D ‾ , b = B D + A B ‾ C , c = A ‾ B C ‾ + C D , d = A B ‾ C ‾ + A ‾ B ‾ C + A B C , e = A + B ‾ C , f = A C ‾ D ‾ + A B + B C ‾ , g = B ‾ C ‾ D ‾ + A B C .
\begin{align*}
a & = BD + \overline{A}C + A\overline{B}\;\overline{C}\;\overline{D}, \\
b & = BD + A \overline{B}C, \\
c & = \overline{A}B\overline{C} + CD, \\
d & = A \overline{B}\;\overline{C} + \overline{A}\;\overline{B}C + ABC, \\
e & = A + \overline{B}C, \\
f & = A\overline{C}\;\overline{D} + AB + B\overline{C}, \\
g & = \overline{B}\;\overline{C}\;\overline{D} + ABC.
\end{align*}
a b c d e f g = B D + A C + A B C D , = B D + A B C , = A B C + C D , = A B C + A B C + A BC , = A + B C , = A C D + A B + B C , = B C D + A BC .
数据选择器
在选择控制的信号作用下,能从多个输入数据中选择一个或多个作为输出。
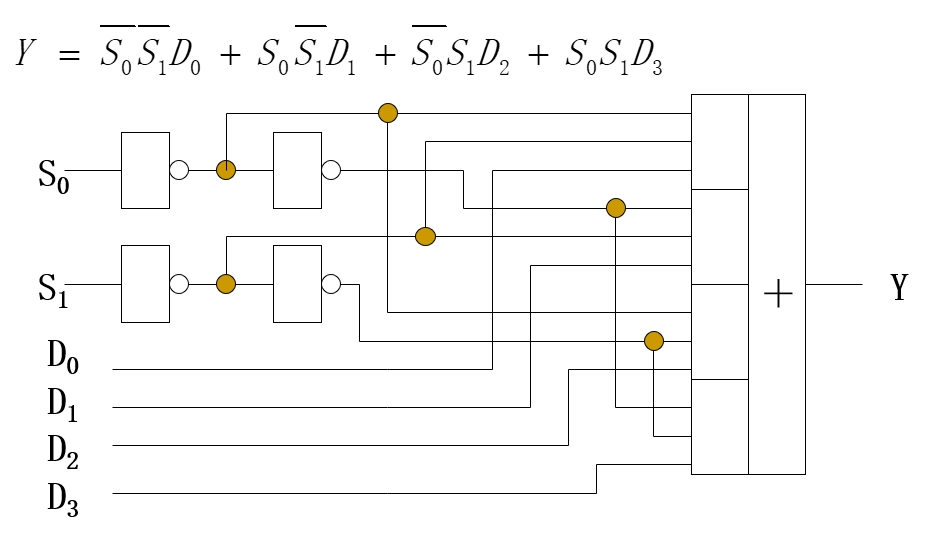
4 选 1 数据选择器
Y = S ‾ 0 S ‾ 1 D 0 + S 0 S ‾ 1 D 1 + S ‾ 0 S 1 D 2 + S 0 S 1 D 3 .
Y = \overline{S}_0\;\overline{S}_1D_0 + S_0\overline{S}_1D_1 + \overline{S}_0S_1D_2 + S_0S_1D_3.
Y = S 0 S 1 D 0 + S 0 S 1 D 1 + S 0 S 1 D 2 + S 0 S 1 D 3 .
通过控制 S 0 S_0 S 0 S 1 S_1 S 1 D 0 ∼ D 3 D_0 \sim D_3 D 0 ∼ D 3
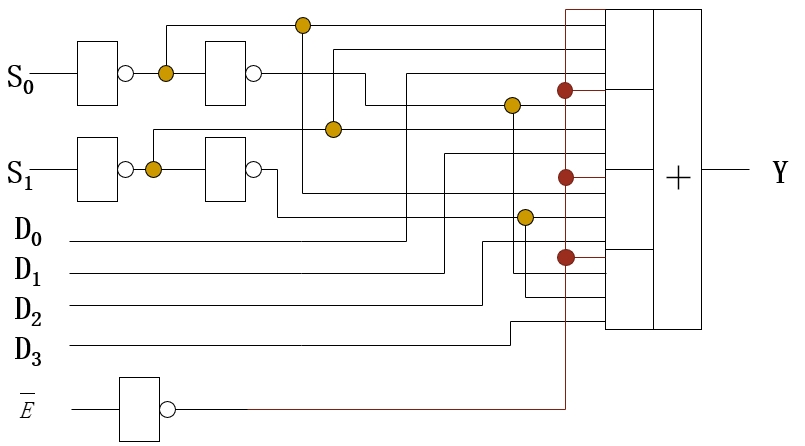
无使能端的 4 选 1 数据选择器 有使能端的 4 选 1 数据选择器 有使能端的双通道 4 选 1 数据选择器 左右两侧的数据选择器一模一样;输出的结构中,既有正信号 Y Y Y W W W
数据选择器的扩展
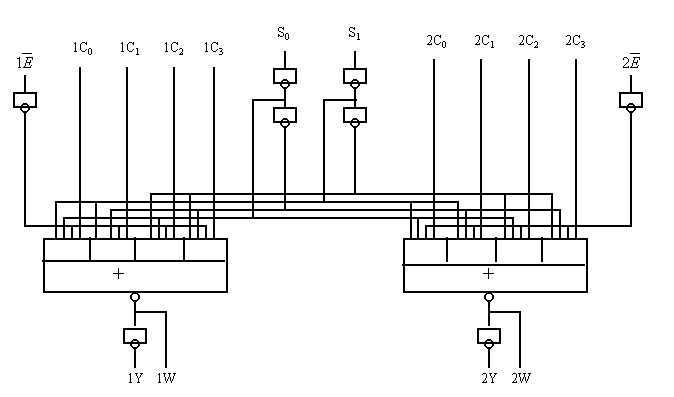
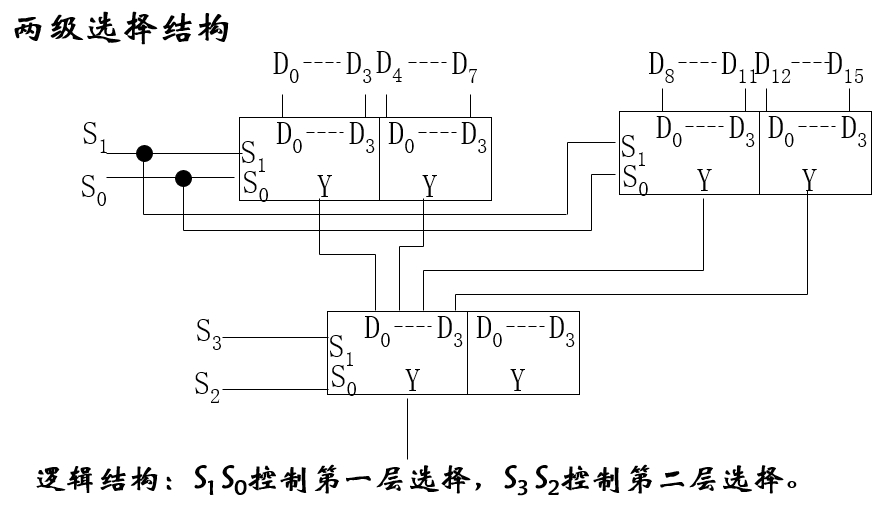
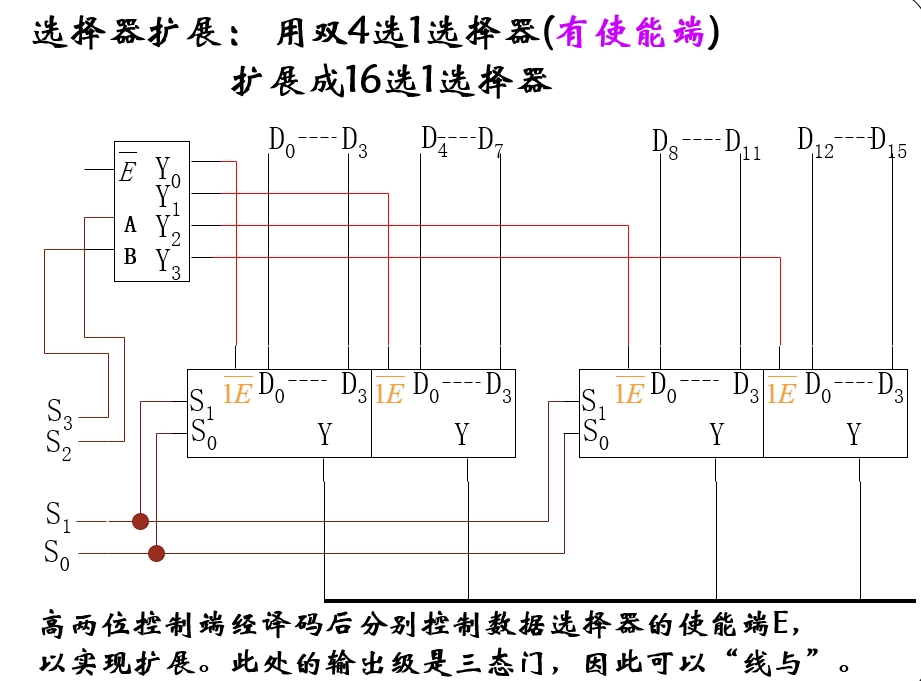
例:用双通道 4 选 1 数据选择器扩展成 16 选 1 数据选择器
有两种不同的扩展方案:可以先选择低两位,也可以先选择高两位。
用双通道 4 选 1 数据选择器(无使能端)扩展成 16 选 1 数据选择器 用双通道 4 选 1 数据选择器(有使能端)扩展成 16 选 1 数据选择器 译码器与数据选择器实现逻辑函数
译码器
译码器可以看成是 N N N 2 N 2^N 2 N
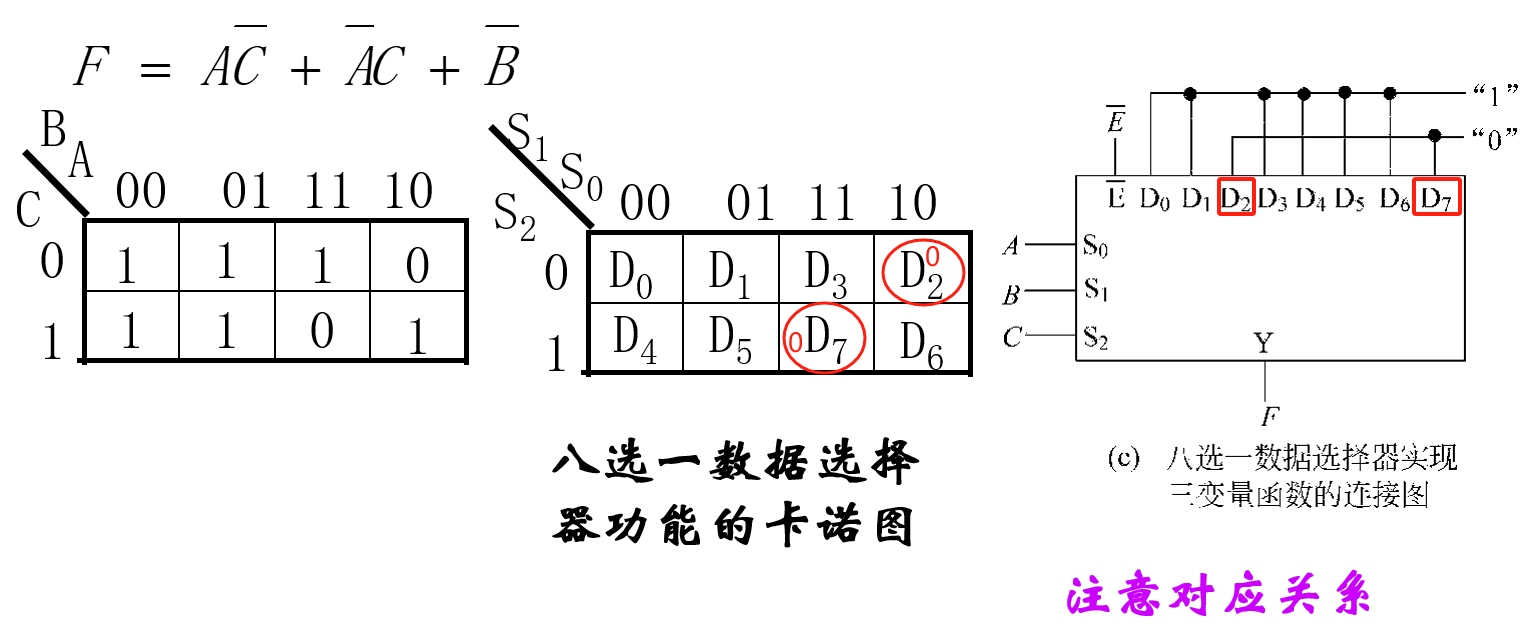
利用译码器实现逻辑函数 数据选择器
数据选择器本身的逻辑结构就是“与-或”表达式。数据选择器可以看成是 N N N 2 N 2^N 2 N 2 N 2^N 2 N 1 1 1
“1”端取的是 Karnaugh 图中的“1”块,“0”端取的是 Karnaugh 图中的“0”块。
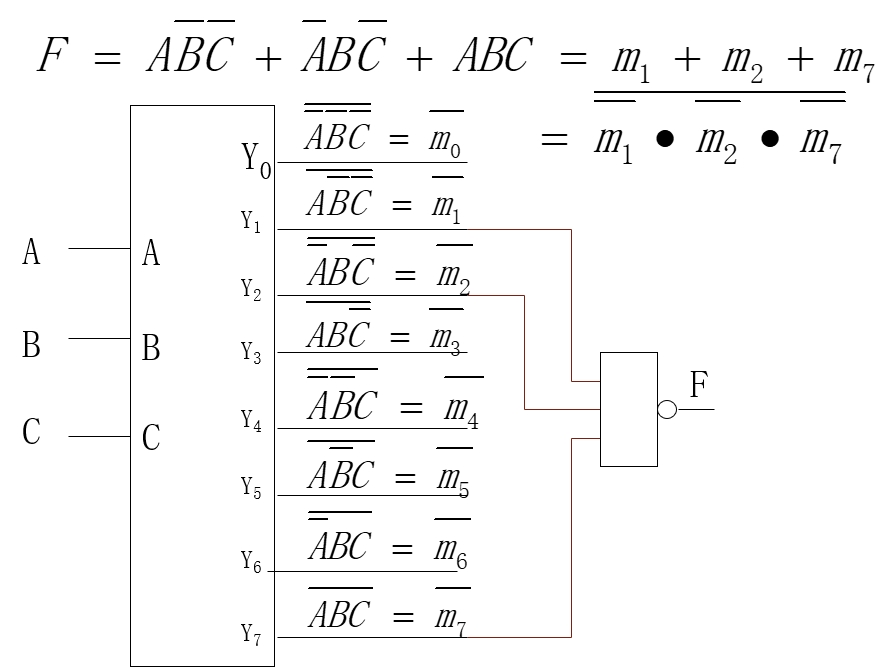
用 8 选 1 数据选择器实现 3 变量函数
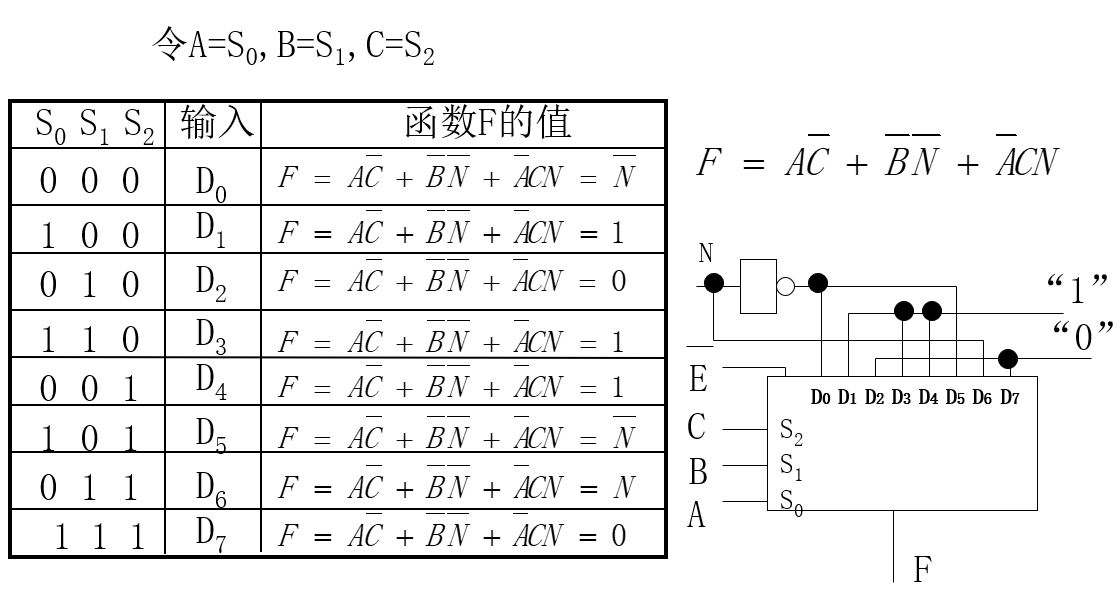
注意 :8 选 1 数据选择器也可以实现 4 变量函数。
4 个变量,其中 3 个用在选择端;第 4 个变量放在数据输入端 。
用 8 选 1 数据选择器实现 4 变量函数
编码器
功能 :将译码器反过来,对应输入的每一个状态,输出一个编码。
常用编码器 :
4-2 编码,将输入的 4 个状态,编成 2 位二进制数码
8-3 编码,将输入的 8 个状态,编成 3 位二进制数码
BCD 编码(8421 码),将输入的 10 个状态,编成 4 位 BCD 码
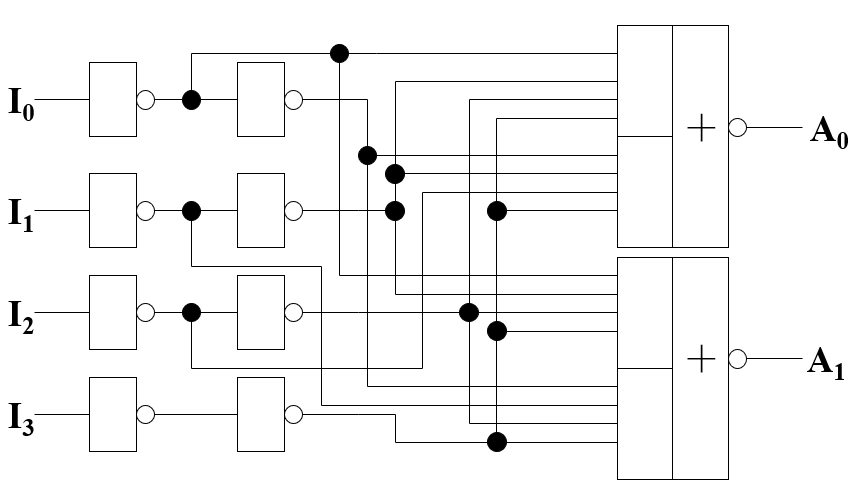
4-2 编码器
功能表
I 0 I_0 I 0 I 1 I_1 I 1 I 2 I_2 I 2 I 3 I_3 I 3 A 0 A_0 A 0 A 1 A_1 A 1
0 0 0 1 1 1 1 1 1 1 1 1 0 0 0 0 0 0 1 1 1 0 0 0 1 1 1 1 1 1 1 1 1 0 0 0 1 1 1 1 1 1 0 0 0 1 1 1 0 0 0 1 1 1 1 1 1 1 1 1 1 1 1 0 0 0 1 1 1 1 1 1
输出的逻辑表达式:
A 0 = I 0 I 1 ‾ I 2 I 3 + I 0 I 1 I 2 I 3 ‾ = I 0 ‾ I 1 I 2 I 3 + I 0 I 1 I 2 ‾ I 3 ‾ , A 1 = I 0 I 1 I 2 ‾ I 3 + I 0 I 1 I 2 I 3 ‾ = I 0 ‾ I 1 I 2 I 3 + I 0 I 1 ‾ I 2 I 3 ‾ .
\begin{align*}
A_0 & = I_0\overline{I_1}I_2I_3 + I_0I_1I_2\overline{I_3} = \overline{\overline{I_0}I_1I_2I_3 + I_0I_1\overline{I_2}I_3}, \\
A_1 & = I_0I_1\overline{I_2}I_3 + I_0I_1I_2\overline{I_3} = \overline{\overline{I_0}I_1I_2I_3 + I_0\overline{I_1}I_2I_3}.
\end{align*}
A 0 A 1 = I 0 I 1 I 2 I 3 + I 0 I 1 I 2 I 3 = I 0 I 1 I 2 I 3 + I 0 I 1 I 2 I 3 , = I 0 I 1 I 2 I 3 + I 0 I 1 I 2 I 3 = I 0 I 1 I 2 I 3 + I 0 I 1 I 2 I 3 . 4-2 编码器
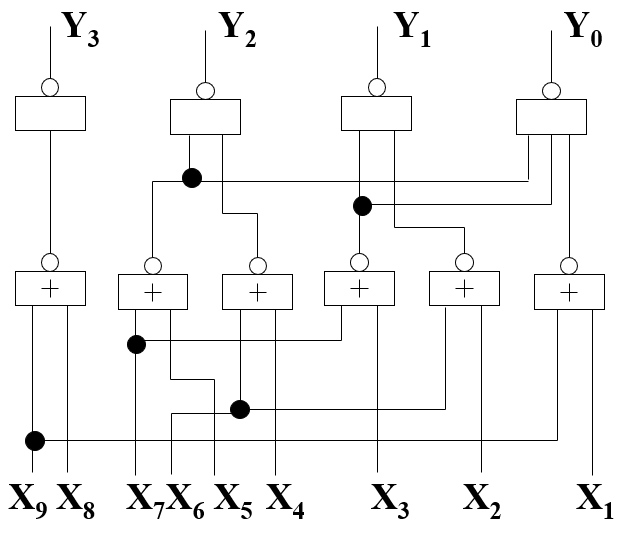
8421 码编码器
功能表
X 9 X_9 X 9 X 8 X_8 X 8 X 7 X_7 X 7 X 6 X_6 X 6 X 5 X_5 X 5 X 4 X_4 X 4 X 3 X_3 X 3 X 2 X_2 X 2 X 1 X_1 X 1 X 0 X_0 X 0 Y 3 Y_3 Y 3 Y 2 Y_2 Y 2 Y 1 Y_1 Y 1 Y 0 Y_0 Y 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 1 1 1 0 0 0 0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 1 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1
输出的逻辑表达式:
Y 0 = X 1 + X 3 + X 5 + X 7 + X 9 , Y 1 = X 2 + X 3 + X 6 + X 7 , Y 2 = X 4 + X 5 + X 6 + X 7 , Y 3 = X 8 + X 9 .
\begin{align*}
Y_0 & = X_1 + X_3 + X_5 + X_7 + X_9, \\
Y_1 & = X_2 + X_3 + X_6 + X_7, \\
Y_2 & = X_4 + X_5 + X_6 + X_7, \\
Y_3 & = X_8 + X_9.
\end{align*}
Y 0 Y 1 Y 2 Y 3 = X 1 + X 3 + X 5 + X 7 + X 9 , = X 2 + X 3 + X 6 + X 7 , = X 4 + X 5 + X 6 + X 7 , = X 8 + X 9 .
8421 码编码器 8-3 优先编码器
问题 :以 4-2 编码器为例,当 I 0 = I 1 = 0 I_0 = I_1 = 0 I 0 = I 1 = 0 A 0 = A 1 = 1 A_0 = A_1 = 1 A 0 = A 1 = 1
原因 :2-4 译码器的输出并没有包含所有四输入的可能组合。只有互斥 输入时,才能使用这种编码器。在任意时刻所有输入线中最多只允许有一个 为 0 0 0 1 1 1
解决办法 :使用优先编码器。
优先编码器 :当两条或两条以上的输入线为 0 0 0 优先按照输入编号最大的信号进行编码 ,称为优先编码器。
8-3 优先编码器 :
输出为反码 ,即用 000 000 000 7 7 7 111 111 111 0 0 0
注意 :8-3 优先编码器输出为反码 。一定要牢记在心。
输入使能端 E ‾ 1 \overline{E}_1 E 1 E ‾ 1 = 0 \overline{E}_1 = 0 E 1 = 0 E ‾ 1 = 1 \overline{E}_1 = 1 E 1 = 1 1 1 1 E 0 E_0 E 0 G s G_s G s
输出的编码是否有效 G s G_s G s G s = 0 G_s = 0 G s = 0 G s = 1 G_s = 1 G s = 1
输出使能端 E 0 E_0 E 0 0 ∼ 7 0 \sim 7 0 ∼ 7 0 0 0 1 1 1 0 0 0 0 0 0
输出的逻辑表达式:
A 0 = E ‾ 1 ‾ ⋅ 7 ‾ + E ‾ 1 ‾ ⋅ 6 ⋅ 5 ‾ + E ‾ 1 ‾ ⋅ 6 ⋅ 4 ⋅ 3 ‾ + E ‾ 1 ‾ ⋅ 6 ⋅ 4 ⋅ 2 ⋅ 1 ‾ ‾ , A 1 = E ‾ 1 ‾ ⋅ 7 ‾ + E ‾ 1 ‾ ⋅ 6 ‾ + E ‾ 1 ‾ ⋅ 5 ⋅ 4 ⋅ 3 ‾ + E ‾ 1 ‾ ⋅ 5 ⋅ 4 ⋅ 2 ‾ ‾ , A 2 = E ‾ 1 ‾ ⋅ 7 ‾ + E ‾ 1 ‾ ⋅ 6 ‾ + E ‾ 1 ‾ ⋅ 5 ‾ + E ‾ 1 ‾ ⋅ 4 ‾ ‾ , E 0 = E ‾ 1 ‾ ⋅ 7 ⋅ 6 ⋅ 5 ⋅ 4 ⋅ 3 ⋅ 2 ⋅ 1 ⋅ 0 ‾ , G s = E ‾ 1 ‾ ⋅ E 0 ‾ .
\begin{align*}
A_0 & = \overline{\overline{\overline{E}_1} \cdot \overline{7} + \overline{\overline{E}_1} \cdot 6 \cdot\overline{5} + \overline{\overline{E}_1} \cdot 6 \cdot 4 \cdot \overline{3} + \overline{\overline{E}_1} \cdot 6 \cdot 4 \cdot 2 \cdot \overline{1}}, \\
A_1 & = \overline{\overline{\overline{E}_1} \cdot \overline{7} + \overline{\overline{E}_1} \cdot \overline{6} + \overline{\overline{E}_1} \cdot 5 \cdot 4 \cdot \overline{3} + \overline{\overline{E}_1} \cdot 5 \cdot 4 \cdot \overline{2}}, \\
A_2 & = \overline{\overline{\overline{E}_1} \cdot \overline{7} + \overline{\overline{E}_1} \cdot \overline{6} + \overline{\overline{E}_1} \cdot \overline{5} + \overline{\overline{E}_1} \cdot \overline{4}}, \\
E_0 & = \overline{\overline{\overline{E}_1} \cdot 7 \cdot 6\cdot 5 \cdot 4 \cdot 3 \cdot 2 \cdot 1 \cdot 0}, \\
G_s & = \overline{\overline{\overline{E}_1}\cdot E_0}.
\end{align*}
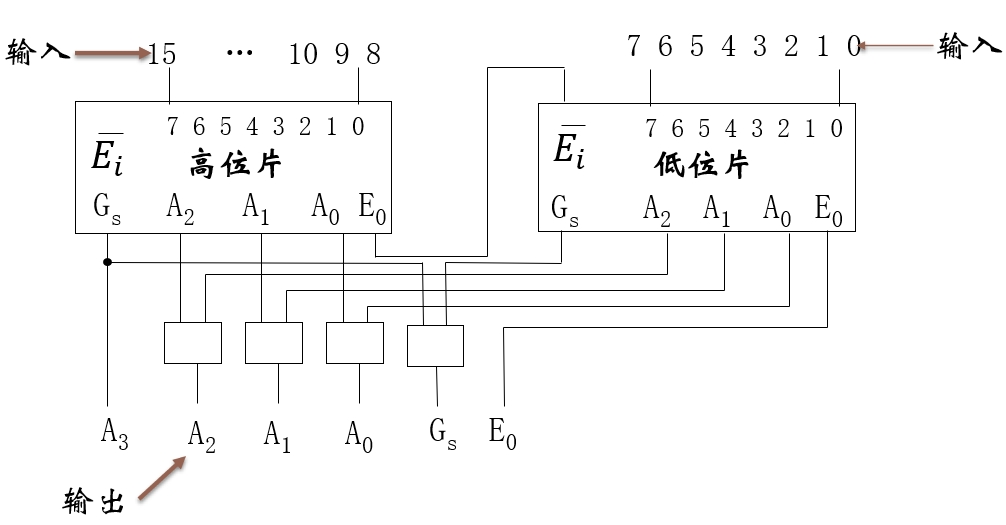
A 0 A 1 A 2 E 0 G s = E 1 ⋅ 7 + E 1 ⋅ 6 ⋅ 5 + E 1 ⋅ 6 ⋅ 4 ⋅ 3 + E 1 ⋅ 6 ⋅ 4 ⋅ 2 ⋅ 1 , = E 1 ⋅ 7 + E 1 ⋅ 6 + E 1 ⋅ 5 ⋅ 4 ⋅ 3 + E 1 ⋅ 5 ⋅ 4 ⋅ 2 , = E 1 ⋅ 7 + E 1 ⋅ 6 + E 1 ⋅ 5 + E 1 ⋅ 4 , = E 1 ⋅ 7 ⋅ 6 ⋅ 5 ⋅ 4 ⋅ 3 ⋅ 2 ⋅ 1 ⋅ 0 , = E 1 ⋅ E 0 . 将 8-3 优先编码器扩展成 16-4 优先编码器
8-3 优先编码器扩展成 16-4 优先编码器 为什么把高位片和低位片的 A i A_i A i
当高位片无 0 0 0 A 0 = A 1 = A 2 = A 3 = 1 A_0 =A_1 = A_2= A_3 = 1 A 0 = A 1 = A 2 = A 3 = 1 A 0 ∼ A 3 A_0 \sim A_3 A 0 ∼ A 3
当高位片有 0 0 0 E 0 = 1 E_0 = 1 E 0 = 1 E 0 E_0 E 0 E ‾ 1 \overline{E}_1 E 1 禁止低位片 。输出取决于高位片的 A 0 ∼ A 3 A_0 \sim A_3 A 0 ∼ A 3
优先编码器的应用 :
设备按照优先等级编码,用于中断响应
键盘输入的读取
数据比较器
数据比较器是数字系统中能够完成数据比较功能 的部件。
比较条件
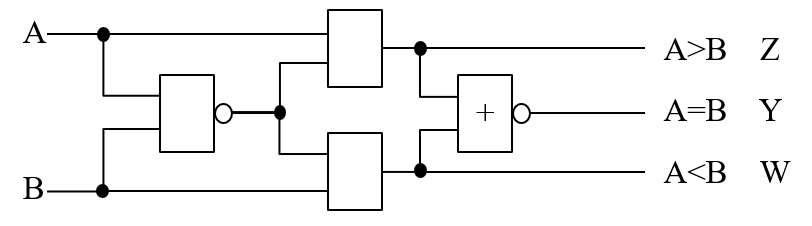
假设给定两数码 A , B ∈ { 0 , 1 } A, B \in \{0, 1\} A , B ∈ { 0 , 1 }
A < B A < B A < B A = 0 , B = 1 A = 0, B = 1 A = 0 , B = 1 A ‾ B = 1 \overline{A}B = 1 A B = 1 W = B A B ‾ = 1 W = B\overline{AB} = 1 W = B A B = 1 A = B A = B A = B A ⊕ B = 0 A \oplus B = 0 A ⊕ B = 0 Y = A A B ‾ + B A B ‾ ‾ = 1 Y = \overline{A\overline{AB} + B\overline{AB}} = 1 Y = A A B + B A B = 1 A > B A > B A > B A = 1 , B = 0 A = 1, B = 0 A = 1 , B = 0 A B ‾ = 1 A\overline{B} = 1 A B = 1 Z = A A B ‾ = 1 Z = A\overline{AB} = 1 Z = A A B = 1
逻辑图如下:
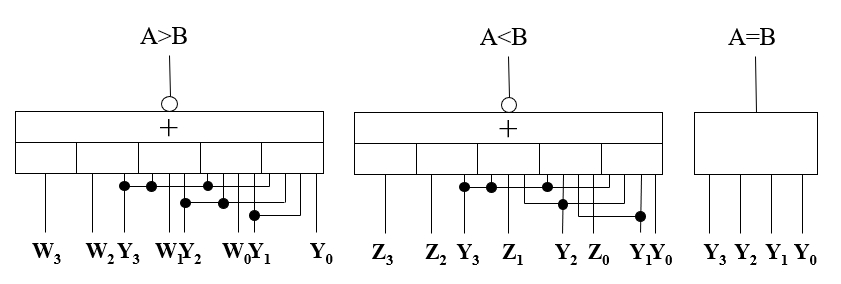
比较条件的逻辑图 按照从高到低每位决定大小,则可以写出 4 位比较器的输出表达式:
[ A < B ] = Z 3 + Y 3 Z 2 + Y 3 Y 2 Z 1 + Y 3 Y 2 Y 1 Z 0 + Y 3 Y 2 Y 1 Y 0 ‾ , [ A = B ] = Y 3 Y 2 Y 1 Y 0 , [ A > B ] = W 3 + Y 3 W 2 + Y 3 Y 2 W 1 + Y 3 Y 2 Y 1 W 0 + Y 3 Y 2 Y 1 Y 0 ‾ .
\begin{align*}
[A < B] & = \overline{Z_3 + Y_3Z_2 + Y_3Y_2Z_1 + Y_3Y_2Y_1Z_0 + Y_3Y_2Y_1Y_0}, \\
[A = B] & = Y_3Y_2Y_1Y_0, \\
[A > B] & = \overline{W_3 + Y_3W_2 + Y_3Y_2W_1 + Y_3Y_2Y_1W_0 + Y_3Y_2Y_1Y_0}.
\end{align*}
[ A < B ] [ A = B ] [ A > B ] = Z 3 + Y 3 Z 2 + Y 3 Y 2 Z 1 + Y 3 Y 2 Y 1 Z 0 + Y 3 Y 2 Y 1 Y 0 , = Y 3 Y 2 Y 1 Y 0 , = W 3 + Y 3 W 2 + Y 3 Y 2 W 1 + Y 3 Y 2 Y 1 W 0 + Y 3 Y 2 Y 1 Y 0 .
注意 :[ A < B ] [A<B] [ A < B ] A ≥ B A \ge B A ≥ B [ A > B ] [A>B] [ A > B ] A ≤ B A \le B A ≤ B
根据输出表达式画出 4 位比较器的原理图如下:
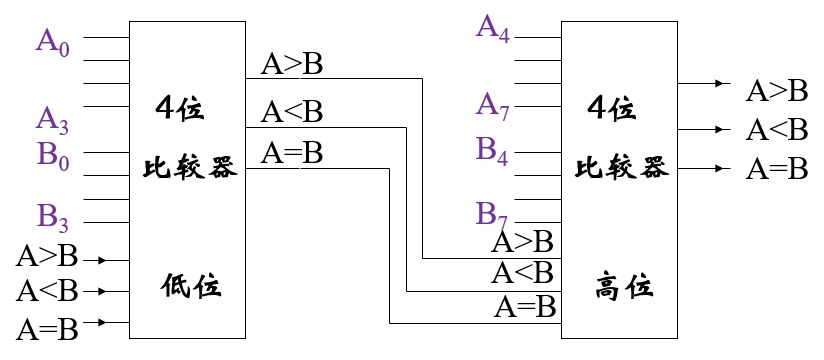
4 位并行比较器原理图 分段比较
分段比较是多片比较器构成更长位数的方法。比较器不仅输出比较结果,还要能接受其它片输出的结果 。
用两片 4 位数字比较器构成一个 8 位的数字比较器 奇偶校验器
奇偶校验器通过检测数据中包含奇数个 1 1 1 1 1 1
异或电路
异或电路能“成对地”消去 1 1 1
异或电路塔状连接能对多位数据进行奇偶检测。
用“异或非”门作基本检测元件的奇偶检测电路
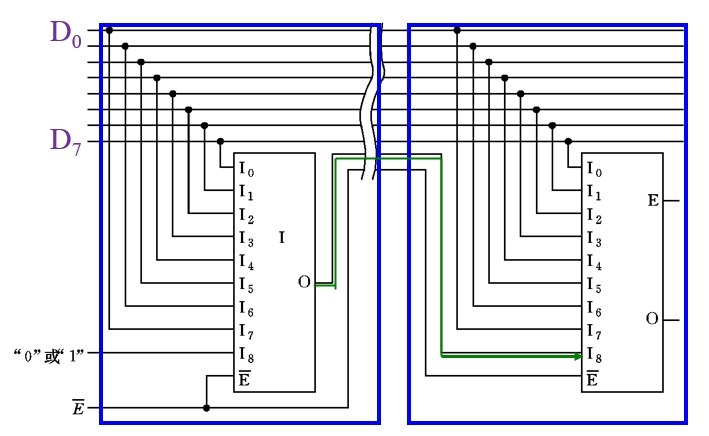
9 位奇偶检测电路之一
采用“异或非”门而不是“异或”门,是为了简化线路和提高速度。
输入端 I 0 ∼ I 9 I_0 \sim I_9 I 0 ∼ I 9 隔离反相门 ,但这一措施不会影响奇偶校验的本质,因为 i ⊕ j ≡ i ‾ ⊕ j ‾ i\oplus j \equiv \overline{i}\oplus \overline{j} i ⊕ j ≡ i ⊕ j
该电路的缺点是传输延迟较长 ,输入信号需要经过 4 级“异或非”门、1 级反相门和 1 级“或非”门才能达到 0 0 0
奇偶检测电路的应用和扩展
奇偶检测系统 左片的 I 81 I_{81} I 81 I 81 = 1 I_{81} = 1 I 81 = 1
左片的输出为奇偶检测码 O 1 O_1 O 1 I 01 ∼ I 71 I_{01}\sim I_{71} I 01 ∼ I 71 I 1 = ⊕ i = 0 i = 7 I i 1 I_1 = \oplus_{i = 0}^{i=7}I_{i1} I 1 = ⊕ i = 0 i = 7 I i 1
O 1 O_1 O 1 I 82 I_{82} I 82 O 2 = O 1 ⊕ I 2 = O 1 ⊕ ( ⊕ i = 0 i = 7 I i 2 ) = ⊕ i = 0 i = 7 ( I i 1 ⊕ I i 2 ) ‾ O_2 = O_1 \oplus I_2 = O_1 \oplus(\oplus_{i=0}^{i=7}I_{i2}) = \overline{\oplus_{i=0}^{i=7}(I_{i1}\oplus I_{i2})} O 2 = O 1 ⊕ I 2 = O 1 ⊕ ( ⊕ i = 0 i = 7 I i 2 ) = ⊕ i = 0 i = 7 ( I i 1 ⊕ I i 2 ) 若 O 2 = 1 O_2 = 1 O 2 = 1 O 2 = 0 O_2 = 0 O 2 = 0
可以看出,运输过程中信息正确,当且仅当 O 2 = I 81 O_2 = I_{81} O 2 = I 81
算术逻辑运算单元 1 位半加器
不考虑低位进位输入和向高位的进位输出,两数码 X n , Y n X_n, Y_n X n , Y n 半加 。
表达式如下:
H n = X n Y n ‾ + X n ‾ Y n = X n ⊕ Y n .
H_n = X_n\overline{Y_n} + \overline{X_n}Y_n = X_n \oplus Y_n.
H n = X n Y n + X n Y n = X n ⊕ Y n .
1 位全加器
将输入 X n , Y n X_n, Y_n X n , Y n C n − 1 C_{n-1} C n − 1 C n C_n C n 全加 。
功能表如下:
X n X_n X n Y n Y_n Y n C n − 1 C_{n-1} C n − 1 F n F_n F n C n C_n C n
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 1 1 1 0 0 0 1 1 1 0 0 0 1 1 1 1 1 1 0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 1 1 1 1 1 1 0 0 0 1 1 1 0 0 0 1 1 1 0 0 0 1 1 1 0 0 0 1 1 1 1 1 1 0 0 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
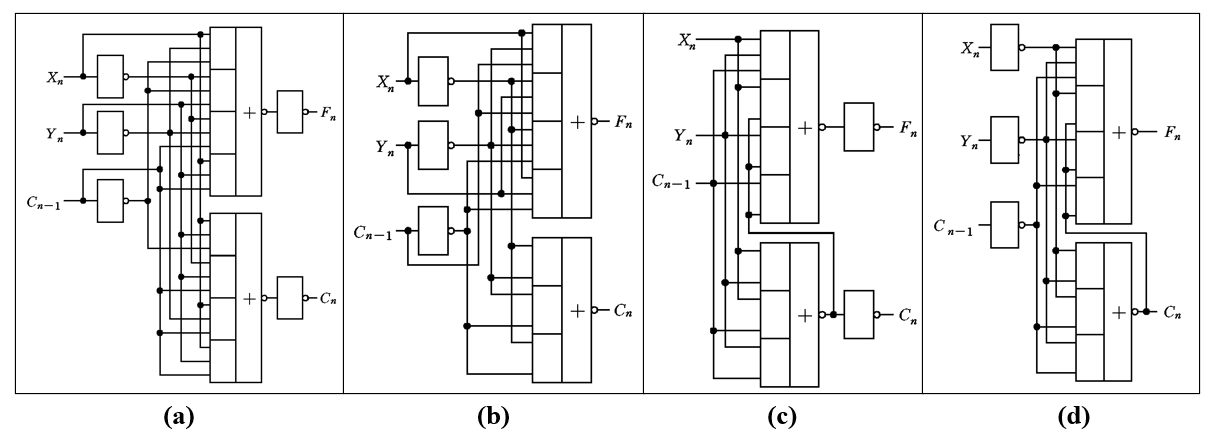
全加器的四种形式
全加器的四种形式 (a):不化简,全部用最小项实现,C n C_n C n F n F_n F n 3 级门延迟 。
F n = X n Y n ‾ C n − 1 ‾ + X n ‾ Y n C n − 1 ‾ + X n ‾ Y n ‾ C n − 1 + X n Y n C n − 1 , C n = X n Y n C n − 1 ‾ + X n Y n ‾ C n − 1 + X n ‾ Y n C n − 1 + X n Y n C n − 1 .
\begin{align*}
F_n & = X_n\overline{Y_n}\;\overline{C_{n-1}} + \overline{X_n}Y_n\overline{C_{n-1}} + \overline{X_n}\;\overline{Y_n}C_{n-1} + X_nY_nC_{n-1}, \\
C_n & = X_nY_n\overline{C_{n-1}} + X_n\overline{Y_n}C_{n-1} + \overline{X_n}Y_nC_{n-1} + X_nY_nC_{n-1}.
\end{align*}
F n C n = X n Y n C n − 1 + X n Y n C n − 1 + X n Y n C n − 1 + X n Y n C n − 1 , = X n Y n C n − 1 + X n Y n C n − 1 + X n Y n C n − 1 + X n Y n C n − 1 .
(b):变换后,C n C_n C n F n F_n F n 2 级门延迟 。
F n = X n Y n C n − 1 ‾ + X n Y n ‾ C n − 1 + X n ‾ Y n C n − 1 + X n ‾ Y n ‾ C n − 1 ‾ ‾ , C n = X n ‾ Y n ‾ + X n ‾ C n − 1 ‾ + Y n ‾ C n − 1 ‾ ‾ .
\begin{align*}
F_n & = \overline{X_nY_n\overline{C_{n-1}} + X_n\overline{Y_n}C_{n-1} + \overline{X_n}Y_nC_{n-1} + \overline{X_n}\;\overline{Y_n}\;\overline{C_{n-1}}} , \\
C_n & = \overline{\overline{X_n}\;\overline{Y_n} + \overline{X_n}\;\overline{C_{n-1}} + \overline{Y_n}\;\overline{C_{n-1}}}.
\end{align*}
F n C n = X n Y n C n − 1 + X n Y n C n − 1 + X n Y n C n − 1 + X n Y n C n − 1 , = X n Y n + X n C n − 1 + Y n C n − 1 .
分析全加器中 F n F_n F n C n C_n C n F n F_n F n 1 1 1
X n = Y n = C n − 1 = 1 X_n = Y_n = C_{n-1} = 1 X n = Y n = C n − 1 = 1 X n X_n X n Y n Y_n Y n C n − 1 C_{n-1} C n − 1 1 1 1 C n = 0 C_n = 0 C n = 0
因此,可以用 C n C_n C n F n F_n F n 先组合出 C n C_n C n F n F_n F n 。
(c):C n C_n C n 2 级门延迟 ,F n F_n F n 3 级门延迟 。
F n = X n Y n C n − 1 + X n C n ‾ + Y n C n ‾ + C n − 1 C n ‾ , C n = X n Y n + X n C n − 1 + Y n C n − 1 .
\begin{align*}
F_n & = X_nY_nC_{n-1} + X_n\overline{C_n} + Y_n\overline{C_n} + C_{n-1}\overline{C_n}, \\
C_n & = X_nY_n + X_nC_{n-1} + Y_nC_{n-1}.
\end{align*}
F n C n = X n Y n C n − 1 + X n C n + Y n C n + C n − 1 C n , = X n Y n + X n C n − 1 + Y n C n − 1 .
(d):C n C_n C n 2 级门延迟 ,F n F_n F n 3 级门延迟 。
F n = X n ‾ Y n ‾ C n − 1 ‾ + X n ‾ C n + Y n ‾ C n + C n − 1 ‾ C n ‾ , C n = X n ‾ Y n ‾ + X n ‾ C n − 1 ‾ + Y n ‾ C n − 1 ‾ ‾ .
\begin{align*}
F_n & = \overline{\overline{X_n}\;\overline{Y_n}\;\overline{C_{n-1}} + \overline{X_n}C_n + \overline{Y_n}C_n + \overline{C_{n-1}}C_n}, \\
C_n & = \overline{\overline{X_n}\;\overline{Y_n} + \overline{X_n}\;\overline{C_{n-1}} + \overline{Y_n}\;\overline{C_{n-1}}}.
\end{align*}
F n C n = X n Y n C n − 1 + X n C n + Y n C n + C n − 1 C n , = X n Y n + X n C n − 1 + Y n C n − 1 .
注意 :由原理可知,F n F_n F n C n C_n C n
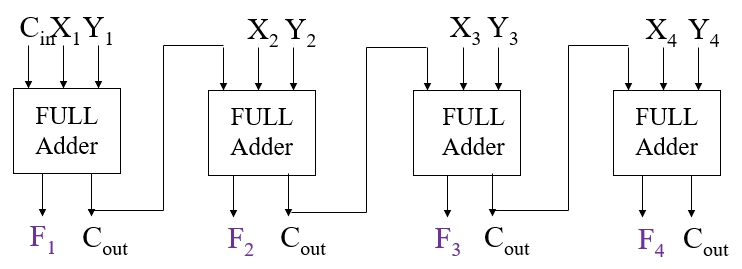
4 位串行进位加法器
将四个 1 位全加器串联起来,前一级输出的 C n − 1 C_{n-1} C n − 1 C n − 1 C_{n-1} C n − 1
4 位串行进位加法器
若仅使用 (b),计算 F n F_n F n C n C_n C n C i − 1 , X i , Y i C_{i-1}, X_i, Y_i C i − 1 , X i , Y i
F 1 F_1 F 1 C 1 C_1 C 1 F 2 F_2 F 2 C 2 C_2 C 2 F 3 F_3 F 3 C 3 C_3 C 3 F 4 F_4 F 4 C 4 C_4 C 4
若仅使用 (c) 或 (d),计算 F n F_n F n C n C_n C n C i − 1 , X i , Y i C_{i-1}, X_i, Y_i C i − 1 , X i , Y i
F 1 F_1 F 1 C 1 C_1 C 1 F 2 F_2 F 2 C 2 C_2 C 2 F 3 F_3 F 3 C 3 C_3 C 3 F 4 F_4 F 4 C 4 C_4 C 4
使用 (c) (d) 交叉串联 可以更快。
由于 (c) 输出的进位是以反码 形式出现的,故接下来接 (d) 可以省去输入 C 1 C_{1} C 1 C 2 C_2 C 2
(c) (d) 交叉串联 F 1 F_1 F 1 C 1 C_1 C 1 F 2 F_2 F 2 C 2 C_2 C 2 F 3 F_3 F 3 C 3 C_3 C 3 F 4 F_4 F 4 C 4 C_4 C 4
注意 :类似于 (c) (d) 的原理,F n F_n F n C n C_n C n
问题 :
由于前一个加法完成并提供进位后,下一个加法器才能开始运算。
延迟长,速度慢。
位数越多,加法完成的时间越长。
4 位并行加法器
是否可以用专用的进位电路 提高速度?
并行加法器(超前进位加法器)各位的进位不是由前一级全加器的进位输出来提供的,而是由专门的进位门 来提供的。
4 位并行加法器原理图 写出各位进位如下:
C 1 = X 1 + Y 1 ‾ + X 1 Y 1 ‾ C 0 ‾ ‾ , C 2 = X 2 + Y 2 ‾ + X 2 Y 2 ‾ X 1 + Y 1 ‾ + X 2 Y 2 ‾ X 1 Y 1 ‾ C 0 ‾ ‾ , C 3 = X 3 + Y 3 ‾ + X 3 Y 3 ‾ X 2 + Y 2 ‾ + X 3 Y 3 ‾ X 2 Y 2 ‾ X 1 + Y 1 ‾ + X 3 Y 3 ‾ X 2 Y 2 ‾ X 1 Y 1 ‾ C 0 ‾ ‾ , C 4 = X 4 + Y 4 ‾ + X 4 Y 4 ‾ X 3 + Y 3 ‾ + X 4 Y 4 ‾ X 3 Y 3 ‾ X 2 + Y 2 ‾ + X 4 Y 4 ‾ X 3 Y 3 ‾ X 2 Y 2 ‾ X 1 + Y 1 ‾ + X 4 Y 4 ‾ X 3 Y 3 ‾ X 2 Y 2 ‾ X 1 Y 1 ‾ C 0 ‾ ‾ .
\begin{align*}
C_1 & = \overline{\overline{X_1 + Y_1} + \overline{X_1Y_1}\;\overline{C_{0}}}, \\
C_2 & = \overline{\overline{X_2 + Y_2} + \overline{X_2Y_2}\;\overline{X_1 + Y_1} + \overline{X_2Y_2}\;\overline{X_1Y_1}\;\overline{C_0}}, \\
C_3 & = \overline{\overline{X_3 + Y_3} + \overline{X_3Y_3}\;\overline{X_2 + Y_2} + \overline{X_3Y_3}\;\overline{X_2Y_2}\;\overline{X_1 + Y_1} + \overline{X_3Y_3}\;\overline{X_2Y_2}\;\overline{X_1Y_1}\;\overline{C_0}}, \\
C_4 & = \overline{\overline{X_4 + Y_4} + \overline{X_4Y_4}\;\overline{X_3 + Y_3} + \overline{X_4Y_4}\;\overline{X_3Y_3}\;\overline{X_2 + Y_2} + \overline{X_4Y_4}\;\overline{X_3Y_3}\;\overline{X_2Y_2}\;\overline{X_1 + Y_1} + \overline{X_4Y_4}\;\overline{X_3Y_3}\;\overline{X_2Y_2}\;\overline{X_1Y_1}\;\overline{C_0}}.
\end{align*}
C 1 C 2 C 3 C 4 = X 1 + Y 1 + X 1 Y 1 C 0 , = X 2 + Y 2 + X 2 Y 2 X 1 + Y 1 + X 2 Y 2 X 1 Y 1 C 0 , = X 3 + Y 3 + X 3 Y 3 X 2 + Y 2 + X 3 Y 3 X 2 Y 2 X 1 + Y 1 + X 3 Y 3 X 2 Y 2 X 1 Y 1 C 0 , = X 4 + Y 4 + X 4 Y 4 X 3 + Y 3 + X 4 Y 4 X 3 Y 3 X 2 + Y 2 + X 4 Y 4 X 3 Y 3 X 2 Y 2 X 1 + Y 1 + X 4 Y 4 X 3 Y 3 X 2 Y 2 X 1 Y 1 C 0 . P i P_i P i G i G_i G i { P i = X i + Y i , G i = X i Y i .
\begin{cases}
P_i = X_i + Y_i, \\
G_i = X_iY_i.
\end{cases}
{ P i = X i + Y i , G i = X i Y i . C 1 = P 1 ‾ + G 1 ‾ C 0 ‾ ‾ , C 2 = P 2 ‾ + G 2 ‾ P 1 ‾ + G 2 ‾ G 1 ‾ C 0 ‾ ‾ , C 3 = P 3 ‾ + G 3 ‾ P 2 ‾ + G 3 ‾ G 2 ‾ P 1 ‾ + G 3 ‾ G 2 ‾ G 1 ‾ C 0 ‾ ‾ , C 4 = P 4 ‾ + G 4 ‾ P 3 ‾ + G 4 ‾ G 3 ‾ P 2 ‾ + G 4 ‾ G 3 ‾ G 2 ‾ P 1 ‾ + G 4 ‾ G 3 ‾ G 2 ‾ G 1 ‾ C 0 ‾ ‾ .
\begin{align*}
C_1 & = \overline{\overline{P_1} + \overline{G_1}\;\overline{C_0}}, \\
C_2 & = \overline{\overline{P_2} + \overline{G_2}\;\overline{P_1} + \overline{G_2}\;\overline{G_1}\;\overline{C_0}}, \\
C_3 & = \overline{\overline{P_3} + \overline{G_3}\;\overline{P_2} + \overline{G_3}\;\overline{G_2}\;\overline{P_1} + \overline{G_3}\;\overline{G_2}\;\overline{G_1}\;\overline{C_0}}, \\
C_4 & = \overline{\overline{P_4} + \overline{G_4}\;\overline{P_3} + \overline{G_4}\;\overline{G_3}\;\overline{P_2} + \overline{G_4}\;\overline{G_3}\;\overline{G_2}\;\overline{P_1} + \overline{G_4}\;\overline{G_3}\;\overline{G_2}\;\overline{G_1}\;\overline{C_0}}.
\end{align*}
C 1 C 2 C 3 C 4 = P 1 + G 1 C 0 , = P 2 + G 2 P 1 + G 2 G 1 C 0 , = P 3 + G 3 P 2 + G 3 G 2 P 1 + G 3 G 2 G 1 C 0 , = P 4 + G 4 P 3 + G 4 G 3 P 2 + G 4 G 3 G 2 P 1 + G 4 G 3 G 2 G 1 C 0 .
注意 :G i ⊕ P i = X i ⊕ Y i G_i \oplus P_i = X_i \oplus Y_i G i ⊕ P i = X i ⊕ Y i
P i P_i P i 1 1 1 G i G_i G i
当前加数没有 1 1 1 P i ‾ \overline{P_i} P i
当前位没有进位且上一位加数中没有 1 1 1 G i ‾ P i − 1 ‾ \overline{G_i}\;\overline{P_{i-1}} G i P i − 1
当前位没有进位且上一位没有进位,且上上一位加数中没有 1 1 1 G i ‾ G i − 1 ‾ P i − 2 ‾ \overline{G_i}\;\overline{G_{i-1}}\;\overline{P_{i-2}} G i G i − 1 P i − 2
……
4 位并行加法器 C i C_i C i F i F_i F i F 1 F_1 F 1
如果写出各位进位如下:
C 1 = X 1 Y 1 + ( X 1 + Y 1 ) C 0 , C 2 = X 2 Y 2 + ( X 2 + Y 2 ) X 1 Y 1 + ( X 2 + Y 2 ) ( X 1 + Y 1 ) C 0 , C 3 = X 3 Y 3 + ( X 3 + Y 3 ) X 2 Y 2 + ( X 3 + Y 3 ) ( X 2 + Y 2 ) X 1 Y 1 + ( X 3 + Y 3 ) ( X 2 + Y 2 ) ( X 1 + Y 1 ) C 0 , C 4 = X 4 Y 4 + ( X 4 + Y 4 ) X 3 Y 3 + ( X 4 + Y 4 ) ( X 3 + Y 3 ) X 2 Y 2 + ( X 4 + Y 4 ) ( X 3 + Y 3 ) ( X 2 + Y 2 ) X 1 Y 1 + ( X 4 + Y 4 ) ( X 3 + Y 3 ) ( X 2 + Y 2 ) ( X 1 + Y 1 ) C 0 ,
\begin{align*}
C_1 & = X_1Y_1 + (X_1 + Y_1)C_0, \\
C_2 & = X_2Y_2 + (X_2 + Y_2)X_1Y_1 + (X_2 + Y_2)(X_1 + Y_1)C_0, \\
C_3 & = X_3Y_3 + (X_3 + Y_3)X_2Y_2 + (X_3 + Y_3)(X_2 + Y_2)X_1Y_1 \\
& \quad + (X_3 + Y_3)(X_2 + Y_2)(X_1 + Y_1)C_0, \\
C_4 & = X_4Y_4 + (X_4 + Y_4)X_3Y_3 + (X_4 + Y_4)(X_3 + Y_3)X_2Y_2 \\
& \quad + (X_4 + Y_4)(X_3 + Y_3)(X_2 + Y_2)X_1Y_1 \\
& \quad + (X_4 + Y_4)(X_3 + Y_3)(X_2 + Y_2)(X_1 + Y_1)C_0,
\end{align*}
C 1 C 2 C 3 C 4 = X 1 Y 1 + ( X 1 + Y 1 ) C 0 , = X 2 Y 2 + ( X 2 + Y 2 ) X 1 Y 1 + ( X 2 + Y 2 ) ( X 1 + Y 1 ) C 0 , = X 3 Y 3 + ( X 3 + Y 3 ) X 2 Y 2 + ( X 3 + Y 3 ) ( X 2 + Y 2 ) X 1 Y 1 + ( X 3 + Y 3 ) ( X 2 + Y 2 ) ( X 1 + Y 1 ) C 0 , = X 4 Y 4 + ( X 4 + Y 4 ) X 3 Y 3 + ( X 4 + Y 4 ) ( X 3 + Y 3 ) X 2 Y 2 + ( X 4 + Y 4 ) ( X 3 + Y 3 ) ( X 2 + Y 2 ) X 1 Y 1 + ( X 4 + Y 4 ) ( X 3 + Y 3 ) ( X 2 + Y 2 ) ( X 1 + Y 1 ) C 0 , C 1 = G 1 + P 1 C 0 , C 2 = G 2 + P 2 G 1 + P 2 P 1 C 0 , C 3 = G 3 + P 3 G 2 + P 3 P 2 G 1 + P 3 P 2 P 1 C 0 , C 4 = G 4 + P 4 G 3 + P 4 P 3 G 2 + P 4 P 3 P 2 G 1 + P 4 P 3 P 2 P 1 C 0 .
\begin{align*}
C_1 & = G_1 + P_1C_0, \\
C_2 & = G_2 + P_2G_1 + P_2P_1C_0, \\
C_3 & = G_3 + P_3G_2 + P_3P_2G_1 + P_3P_2P_1C_0, \\
C_4 & = G_4 + P_4G_3 + P_4P_3G_2 + P_4P_3P_2G_1 + P_4P_3P_2P_1C_0.
\end{align*}
C 1 C 2 C 3 C 4 = G 1 + P 1 C 0 , = G 2 + P 2 G 1 + P 2 P 1 C 0 , = G 3 + P 3 G 2 + P 3 P 2 G 1 + P 3 P 2 P 1 C 0 , = G 4 + P 4 G 3 + P 4 P 3 G 2 + P 4 P 3 P 2 G 1 + P 4 P 3 P 2 P 1 C 0 . P i P_i P i G i G_i G i
当前位已经进位,即 G i G_i G i
上一位已经进位,且这一位加数中有 1 1 1 P i G i − 1 P_iG_{i-1} P i G i − 1
上上一位已经进位,且上一位和这一位加数中都有 1 1 1 P i P i − 1 G i − 2 P_iP_{i-1}G_{i-2} P i P i − 1 G i − 2
……
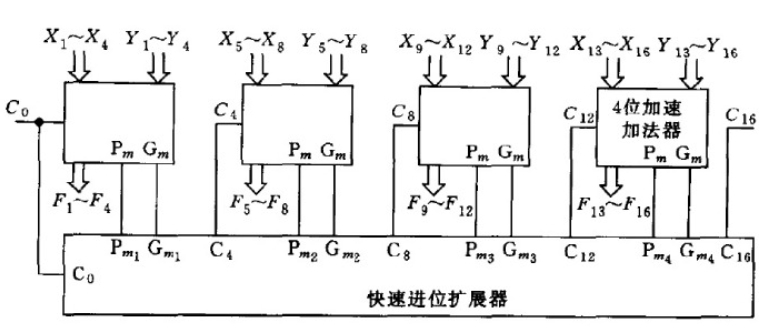
16 位加法器
如果将四块 4 位加法器串联组成 16 位加法器,虽然各片内的进位是采用超前进位的,但是片间进位仍是逐片传递的 ,所以仍然有延迟长、速度慢的问题。
因此,可以考虑类似超前进位加法器的原理形成各组间进位 C 4 , C 8 , C 12 , C 16 C_4, C_8, C_{12}, C_{16} C 4 , C 8 , C 12 , C 16
记
G m i = G i + P i G i − 1 + P i P i − 1 G i − 2 + P i P i − 1 P i − 2 G i − 3 , P m i = P i P i − 1 P i − 2 P i − 3 ,
\begin{align*}
G_{m_i} & = G_i + P_iG_{i-1} + P_iP_{i-1}G_{i-2} + P_iP_{i-1}P_{i-2}G_{i-3}, \\
P_{m_i} & = P_iP_{i-1}P_{i-2}P_{i-3},
\end{align*}
G m i P m i = G i + P i G i − 1 + P i P i − 1 G i − 2 + P i P i − 1 P i − 2 G i − 3 , = P i P i − 1 P i − 2 P i − 3 , C 4 , C 8 , C 12 , C 16 C_4, C_8, C_{12}, C_{16} C 4 , C 8 , C 12 , C 16 C 4 = G m 1 + P m 1 C 0 , C 8 = G m 2 + P m 2 G m 1 + P m 2 P m 1 C 0 , C 12 = G m 3 + P m 3 G m 2 + P m 3 P m 2 G m 1 + P m 3 P m 2 P m 1 C 0 , C 16 = G m 4 + P m 4 G m 3 + P m 4 P m 3 G m 2 + P m 4 P m 3 P m 2 G m 1 + P m 4 P m 3 P m 2 P m 1 C 0 .
\begin{align*}
C_4 & = G_{m_1} + P_{m_1}C_0, \\
C_8 & = G_{m_2} + P_{m_2}G_{m_1} + P_{m_2}P_{m_1}C_0, \\
C_{12} & = G_{m_3} + P_{m_3}G_{m_2} + P_{m_3}P_{m_2}G_{m_1} + P_{m_3}P_{m_2}P_{m_1}C_0, \\
C_{16} & = G_{m_4} + P_{m_4}G_{m_3} + P_{m_4}P_{m_3}G_{m_2} + P_{m_4}P_{m_3}P_{m_2}G_{m_1} + P_{m_4}P_{m_3}P_{m_2}P_{m_1}C_0.
\end{align*}
C 4 C 8 C 12 C 16 = G m 1 + P m 1 C 0 , = G m 2 + P m 2 G m 1 + P m 2 P m 1 C 0 , = G m 3 + P m 3 G m 2 + P m 3 P m 2 G m 1 + P m 3 P m 2 P m 1 C 0 , = G m 4 + P m 4 G m 3 + P m 4 P m 3 G m 2 + P m 4 P m 3 P m 2 G m 1 + P m 4 P m 3 P m 2 P m 1 C 0 . C 1 ∼ C 4 C_1\sim C_4 C 1 ∼ C 4 P i , G i P_i, G_i P i , G i P m i , G m i P_{m_i}, G_{m_i} P m i , G m i C 4 , C 8 , C 12 , C 16 C_4, C_8, C_{12}, C_{16} C 4 , C 8 , C 12 , C 16
超前进位扩展器逻辑图 四位并行加法器的输出提供 P m i , G m i P_{m_i}, G_{m_i} P m i , G m i
产生 C 4 , C 8 , C 12 , C 16 C_4, C_8, C_{12}, C_{16} C 4 , C 8 , C 12 , C 16
产生 F 1 ∼ F 4 F_1 \sim F_4 F 1 ∼ F 4 F 5 ∼ F 16 F_5 \sim F_{16} F 5 ∼ F 16
算术逻辑运算单元(ALU)
ALU 是 CPU 的核心,不仅能完成算术运算(加法、减法等),而且能完成逻辑运算(比较、与、或、非、移位等)。
4 位算术逻辑运算单元
4 位 ALU 的核心是 4 位并行加法器,通过控制加法器的一些逻辑门或改变进位逻辑门能够获得多种功能。
运算能力的两种获得方法:
方法一:封锁 4 位加法器中的一些逻辑门
方法二:改变加法器的进位产生函数 G i G_i G i P i P_i P i
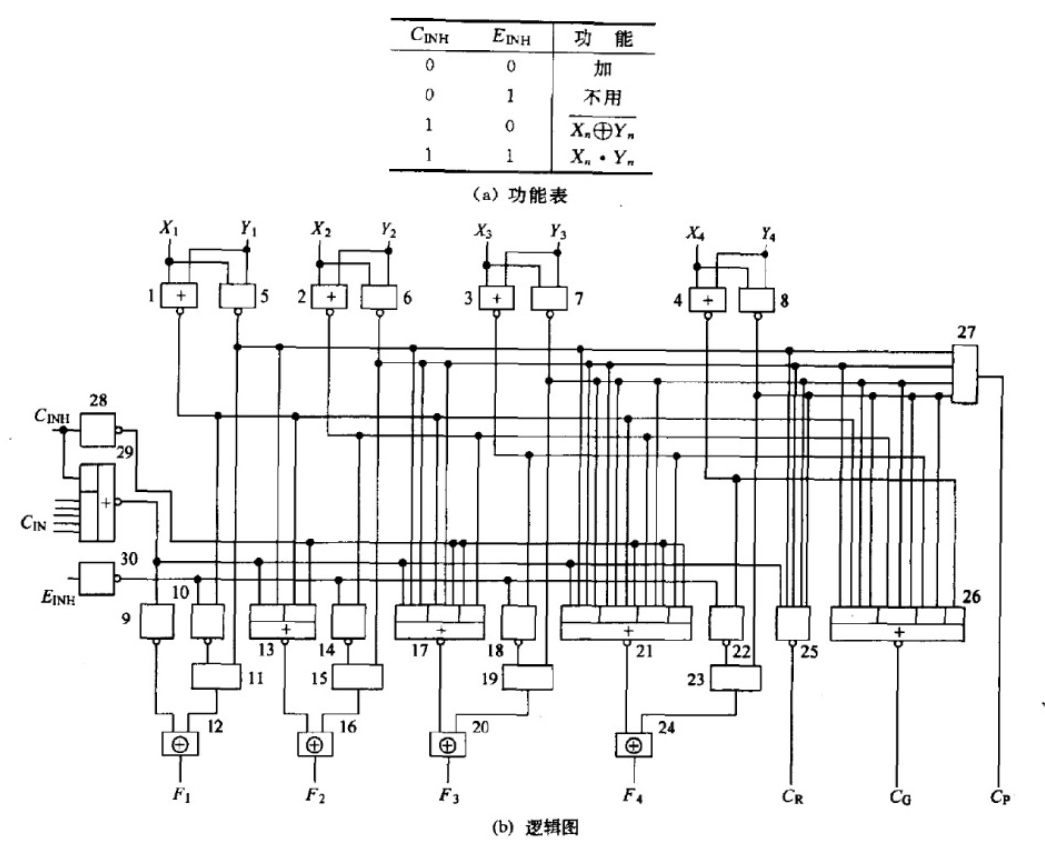
方法一:在控制信号 C INH , E INH C_{\text{INH}}, E_{\text{INH}} C INH , E INH
4 位算术逻辑运算单元(方法一) 方法二:M M M M = H M = \text{H} M = H M = L M = \text{L} M = L
4 位算术逻辑运算单元(方法二)(1) 4 位算术逻辑运算单元(方法二)(2) 第 5 章 同步时序电路 时序逻辑电路和组合逻辑电路的区别
组合逻辑电路某一时刻的输出只取决于此时刻的输入。
时序逻辑电路某一时刻的稳定输出不仅取决于当时的输入,还取决于过去的输入(历史状态)。
记忆元件 (Memory Device)是时序逻辑电路的基本元件。计算机中的实现记忆存储功能的元件有多种:磁存储、光存储、半导体存储(电存储)。
时序逻辑电路中的记忆元件一定要是可修改、可控制的。这种元件被称为“触发器”。
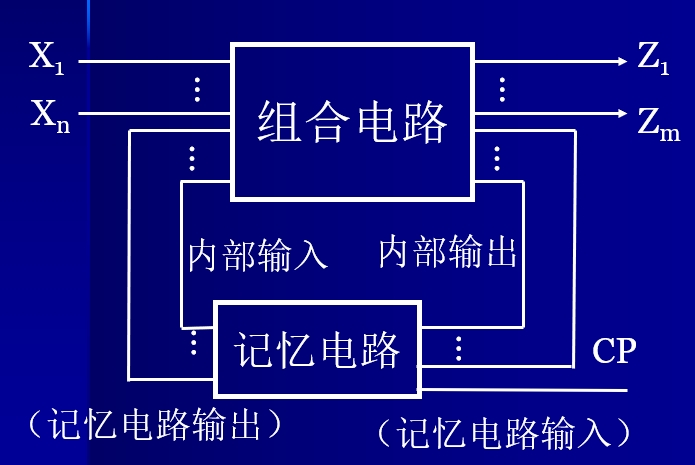
同步时序电路的结构
时序电路的一般结构 概念
激励函数:次态和中间变量 关于现态、中间变量和其他输入 的函数。
激励表:功能表经行列重排后的表格,以现态 和次态 为自变量 ,输入 为因变量 。
状态表:以输入和现态为自变量,次态为因变量的表格。
状态图:将状态表转化为类似 DFA 形式的图形。
触发器的状态方程
牢记三种触发器的状态方程,可以辅助我们快速写出时序电路的激励函数。
D 触发器的状态方程为 Q n + 1 = D Q_{n+1} = D Q n + 1 = D
J-K 触发器的状态方程为 Q n + 1 = J Q n ‾ + K ‾ Q n Q_{n+1} = J\overline{Q_n}+\overline{K}Q_n Q n + 1 = J Q n + K Q n
T 触发器的状态方程为 Q n + 1 = T ⊕ Q n Q_{n+1} = T \oplus Q_n Q n + 1 = T ⊕ Q n
特点
各触发器使用同一个 CP。
只有约定时钟到来,电路状态才能改变。
一个脉冲只能改变一次状态。
同步时序电路的分析 分析步骤
根据电路图列出触发器激励函数表达式和电路输出函数(分析由于触发器输入的变化而引起次态的变化以及输出的变化,所以必须要明确触发器的输入变化);
根据电路输入和触发器激励函数建立次态表达式和状态表(分析触发器状态的变化规律);
画出状态图和时序图(能够更直观分析状态的变化规律);
分析输出序列和输入序列的关系,说明时序电路的逻辑功能。
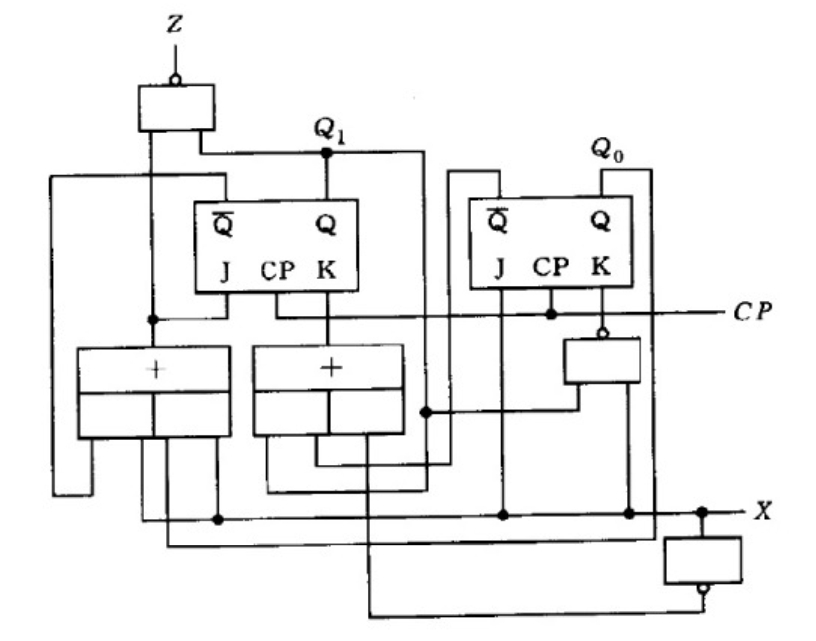
例题
作出以下同步时序电路的状态表和状态图,X X X 0110110 0110110 0110110
某同步时序电路的逻辑图
写出电路的输出函数和触发器的激励函数如下:
{ Z = Q 1 J 1 ‾ , J 0 = X , K 0 = Q 1 X ‾ , J 1 = Q 0 X + Q 1 ‾ X , K 1 = X ‾ + Q 0 ‾ Q 1 .
\begin{cases}
Z & = \overline{Q_1 J_1}, \\
J_0 & = X, \\
K_0 & = \overline{Q_1 X}, \\
J_1 & = Q_0 X + \overline{Q_1}X, \\
K_1 & = \overline{X} + \overline{Q_0}Q_1.
\end{cases}
⎩ ⎨ ⎧ Z J 0 K 0 J 1 K 1 = Q 1 J 1 , = X , = Q 1 X , = Q 0 X + Q 1 X , = X + Q 0 Q 1 . { Q 1 , n + 1 = J 1 Q 1 , n ‾ + K 1 ‾ Q 1 , n , Q 0 , n + 1 = J 0 Q 0 , n ‾ + K 0 ‾ Q 0 , n .
\begin{cases}
Q_{1, n+1} & = J_1\overline{Q_{1, n}} + \overline{K_1}Q_{1, n}, \\
Q_{0, n+1} & = J_0\overline{Q_{0, n}} + \overline{K_0}Q_{0, n}.
\end{cases}
{ Q 1 , n + 1 Q 0 , n + 1 = J 1 Q 1 , n + K 1 Q 1 , n , = J 0 Q 0 , n + K 0 Q 0 , n . { Q 1 , n + 1 = Q 1 , n ‾ X + Q 1 , n Q 0 , n X , Q 0 , n + 1 = Q 0 , n ‾ X + Q 1 , n Q 0 , n X , Z = Q 1 , n Q 0 , n X ‾
\begin{cases}
Q_{1, n+1} & = \overline{Q_{1, n}}X + Q_{1, n}Q_{0, n}X, \\
Q_{0, n+1} & = \overline{Q_{0, n}}X + Q_{1, n}Q_{0, n}X, \\
Z & = \overline{Q_{1, n}Q_{0, n}X}
\end{cases}
⎩ ⎨ ⎧ Q 1 , n + 1 Q 0 , n + 1 Z = Q 1 , n X + Q 1 , n Q 0 , n X , = Q 0 , n X + Q 1 , n Q 0 , n X , = Q 1 , n Q 0 , n X Q 0 , n + 1 Q 1 , n + 1 / Z Q_{0, n+1}Q_{1, n+1}/Z Q 0 , n + 1 Q 1 , n + 1 / Z
Q 0 , n Q 1 , n \ X Q_{0, n}Q_{1, n}\backslash X Q 0 , n Q 1 , n \ X 0 0 0 1 1 1
00 00 00 00 / 1 00/1 00/1 11 / 1 11/1 11/1 01 01 01 00 / 1 00/1 00/1 10 / 1 10/1 10/1 11 11 11 00 / 1 00/1 00/1 11 / 0 11/0 11/0 10 10 10 00 / 1 00/1 00/1 01 / 1 01/1 01/1
状态图如下(转移边为 X / Z X/Z X / Z
graph LR
A((00)) -->|1/1| D((11))
A -->|0/1| A
B((01)) -->|0/1| A
B -->|1/1| C
C((10)) -->|0/1| A
C -->|1/1| B
D -->|0/1| A
D -->|1/0| D
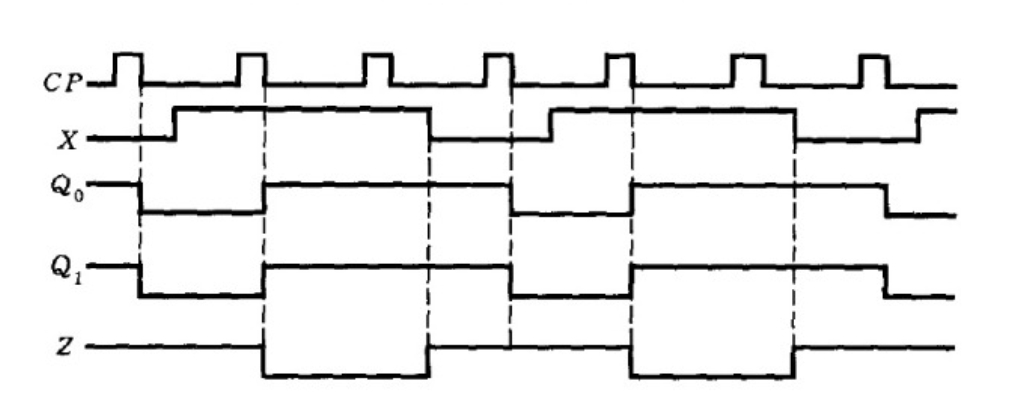
由于使用的是主-从 J-K 触发器 ,因此输入 X X X CP = 0 \text{CP} = 0 CP = 0 CP \text{CP} CP X X X 0110110 0110110 0110110
某同步时序电路的时序图 同步时序电路的设计 设计步骤
确定输入变量和输出变量 作原始状态表 :根据给定的电路设计条件构成原始状态表。状态化简 :原始状态表通常不是最小化状态表,它一般包含多余的状态,因此要对原始状态表进行化简。
状态分配 :给简化后的状态用一个二进制数来编码。求出激励函数和输出函数 :根据选用的触发器激励表和电路的状态表,综合出电路中各个触发器的激励函数和电路的输出函数。画逻辑图
例题
用与非门和 D 触发器设计一个同步时序逻辑电路,以检测输入信号序列是否为连续的 110 110 110
第一步:确定输入变量和输出变量
由题知:
只有一个输入变量,记为 X X X X X X
只有一个输出变量,记为 Z Z Z Z = 0 Z = 0 Z = 0 110 110 110 Z = 1 Z = 1 Z = 1 110 110 110
第二步:作原始状态表
状态图(本质为一个 DFA)如下:
graph LR
style Start fill:none,stroke-width:0px
Start --> a((a))
a -->|0/0| b((b))
a -->|1/0| c((c))
b -->|0/0| d((d))
b -->|1/0| e((e))
c -->|0/0| f((f))
c -->|1/0| g((g))
d -->|0/0| d
d -->|1/0| e
e -->|0/0| f
e -->|1/0| g
f -->|0/0| d
f -->|1/0| e
g -->|0/1| f
g -->|1/0| g
假设初始状态为 a。
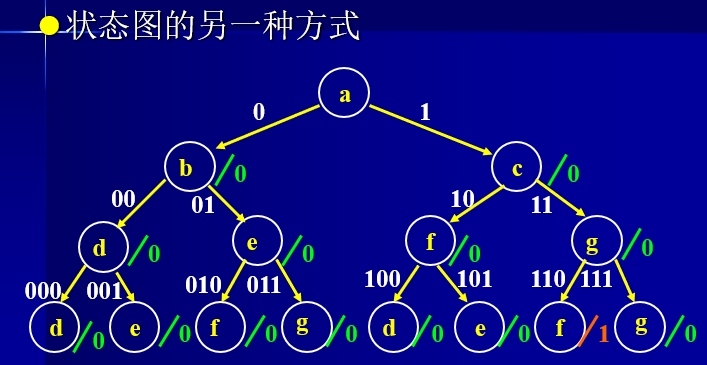
状态图也有另外一种方式来表示:
状态图的另一种方式
原始状态表如下(表中元素为 ( Q N + 1 , Z ) (Q_{N+1}, Z) ( Q N + 1 , Z )
Q N \ X Q_N\backslash X Q N \ X 0 0 0 1 1 1
a a a ( b , 0 ) (b, 0) ( b , 0 ) ( c , 0 ) (c, 0) ( c , 0 ) b b b ( d , 0 ) (d, 0) ( d , 0 ) ( e , 0 ) (e, 0) ( e , 0 ) c c c ( f , 0 ) (f, 0) ( f , 0 ) ( g , 0 ) (g, 0) ( g , 0 ) d d d ( d , 0 ) (d, 0) ( d , 0 ) ( e , 0 ) (e, 0) ( e , 0 ) e e e ( f , 0 ) (f, 0) ( f , 0 ) ( g , 0 ) (g, 0) ( g , 0 ) f f f ( d , 0 ) (d, 0) ( d , 0 ) ( e , 0 ) (e, 0) ( e , 0 ) g g g ( f , 1 ) (f, 1) ( f , 1 ) ( g , 0 ) (g, 0) ( g , 0 )
第三步:状态化简
注意到 { b , d , f } \{b, d, f\} { b , d , f } { c , e } \{c, e\} { c , e } a a a p 0 = { b , d , f } p_0 = \{b, d, f\} p 0 = { b , d , f } p = { a , b , d , f } , q = { c , e } , r = { g } .
\begin{align*}
p & = \{a, b, d, f\}, \\
q & = \{c, e\}, \\
r & = \{g\}.
\end{align*}
p q r = { a , b , d , f } , = { c , e } , = { g } . ( Q N + 1 , Z ) (Q_{N+1}, Z) ( Q N + 1 , Z )
Q N \ X Q_N\backslash X Q N \ X 0 0 0 1 1 1
p p p ( p , 0 ) (p, 0) ( p , 0 ) ( q , 0 ) (q, 0) ( q , 0 ) q q q ( p , 0 ) (p, 0) ( p , 0 ) ( r , 0 ) (r, 0) ( r , 0 ) r r r ( p , 1 ) (p, 1) ( p , 1 ) ( r , 0 ) (r, 0) ( r , 0 )
状态图如下:
graph LR
p((p)) -->|0/0| p
p -->|1/0| q((q))
q -->|0/0| p
q -->|1/0| r((r))
r -->|1/0| r
r -->|0/1| p
第四步:状态分配
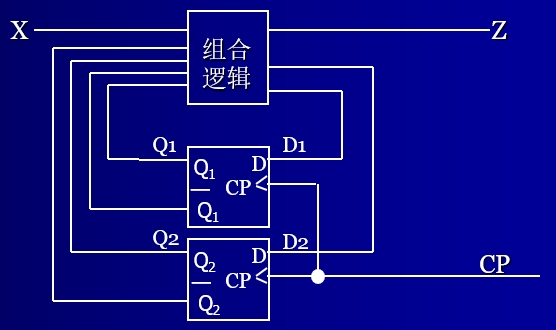
一共有 p , q , r p, q, r p , q , r ⌈ log 2 ( 3 ) ⌉ = 2 \left\lceil\log_2(3)\right\rceil = 2 ⌈ log 2 ( 3 ) ⌉ = 2 p = 00 , q = 10 , r = 11 p = 00, q = 10, r = 11 p = 00 , q = 10 , r = 11 110 110 110
110 序列检测器的组成框图 第五步:求出激励函数和输出函数
输入为 X , Q 1 , Q 1 ‾ , Q 2 , Q 2 ‾ X, Q_1, \overline{Q_1}, Q_2, \overline{Q_2} X , Q 1 , Q 1 , Q 2 , Q 2
输出为 Z , D 1 , D 2 Z, D_1, D_2 Z , D 1 , D 2
写出激励函数和输出函数表格如下:
X X X Q 2 N Q_{2N} Q 2 N Q 1 N Q_{1N} Q 1 N Q 2 , N + 1 Q_{2, N+1} Q 2 , N + 1 Q 1 , N + 1 Q_{1, N+1} Q 1 , N + 1 D 2 D_2 D 2 D 1 D_1 D 1 Z Z Z
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 1 1 1 0 0 0 0 0 0 1 1 1 0 0 0 1 1 1 0 0 0 0 0 0 1 1 1 1 1 1 0 0 0 1 1 1 1 1 1 1 1 1 1 1 1 0 0 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 0 0 - 0 0 0 1 1 1 - - - - -
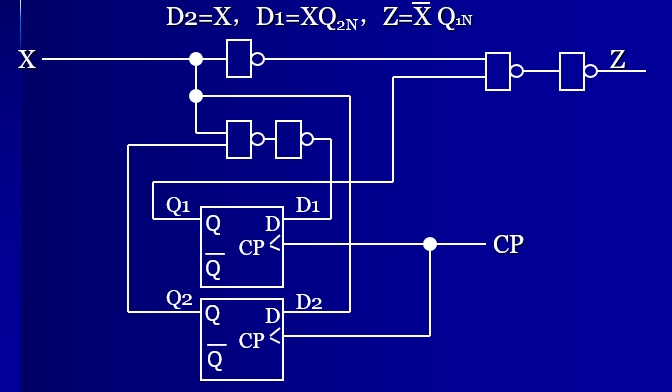
得到 D 2 = X , D 1 = X Q 2 N , Z = X ‾ Q 1 N D_2 = X, D_1 = XQ_{2N}, Z = \overline{X}Q_{1N} D 2 = X , D 1 = X Q 2 N , Z = X Q 1 N
第六步:画逻辑图
110 序列检测器的逻辑图 计数器 D 触发器实现的 4 位二进制计数器
状态方程
D 0 = Q 0 , N + 1 = Q 0 , N ‾ , D 1 = Q 1 , N + 1 = Q 1 , N ⊕ Q 0 , N , D 2 = Q 2 , N + 1 = Q 2 , N ⊕ Q 1 , N Q 0 , N , D 3 = Q 3 , N + 1 = Q 3 , N ⊕ Q 2 , N Q 1 , N Q 0 , N .
\begin{align*}
D_0 & = Q_{0, N+1} = \overline{Q_{0, N}}, \\
D_1 & = Q_{1, N+1} = Q_{1, N} \oplus Q_{0, N}, \\
D_2 & = Q_{2, N+1} = Q_{2, N} \oplus Q_{1, N}Q_{0, N}, \\
D_3 & = Q_{3, N+1} = Q_{3, N} \oplus Q_{2, N}Q_{1, N}Q_{0, N}.
\end{align*}
D 0 D 1 D 2 D 3 = Q 0 , N + 1 = Q 0 , N , = Q 1 , N + 1 = Q 1 , N ⊕ Q 0 , N , = Q 2 , N + 1 = Q 2 , N ⊕ Q 1 , N Q 0 , N , = Q 3 , N + 1 = Q 3 , N ⊕ Q 2 , N Q 1 , N Q 0 , N .
J-K 触发器实现的 4 位二进制计数器
状态方程
J 0 = K 0 = 1 , J 1 = K 1 = Q 0 , J 2 = K 2 = Q 1 Q 0 , J 3 = K 3 = Q 2 Q 1 Q 0 .
\begin{align*}
J_0 & = K_0 = 1, \\
J_1 & = K_1 = Q_0, \\
J_2 & = K_2 = Q_1Q_0, \\
J_3 & = K_3 = Q_2Q_1Q_0.
\end{align*}
J 0 J 1 J 2 J 3 = K 0 = 1 , = K 1 = Q 0 , = K 2 = Q 1 Q 0 , = K 3 = Q 2 Q 1 Q 0 .
可逆计数器
基本结构为 Q 1 = X F − + X ‾ F + Q_{1} = XF^{-} + \overline{X}\;F^{+} Q 1 = X F − + X F + X X X 0 0 0 X = 1 X = 1 X = 1
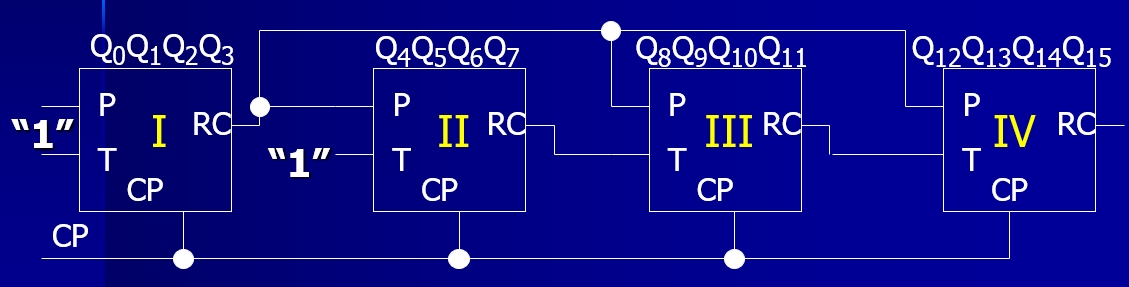
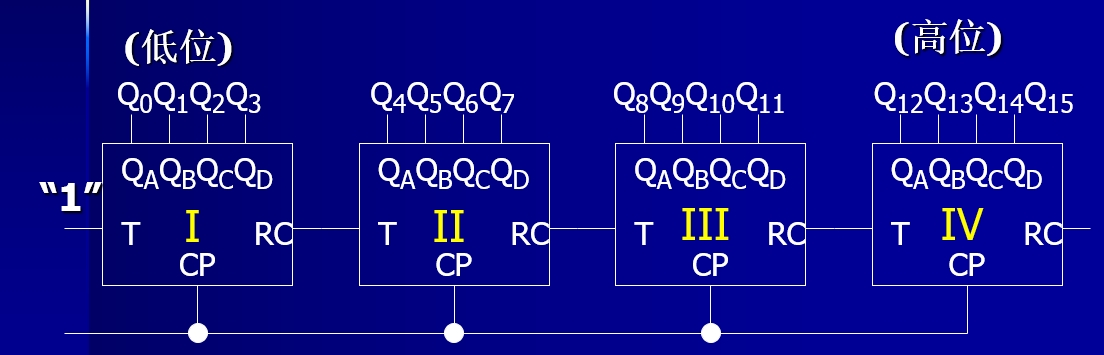
集成化的 4 位二进制计数器
集成化的计数器具有的基本功能
异步/同步清零:初始化
异步清零有两种方式:(1) 用触发器提供的异步清零 (2) 在输出时用组合逻辑限定 R D ‾ ⋅ Q \overline{R_D}\cdot Q R D ⋅ Q
方法 (2) 在使用时需要慎重,因为这只是从输出上(外表上)清零了,计数器仍然在工作,可能会出现 0000 0000 0000 0011 0011 0011
同步置数:开始计数的初值
计数:正常工作
保持:计数到某个特定的计数值保持
假设低位片进位到了高位片,低位片清零。此时低位片继续开始计数,高位片需要保持。
扩展性:相同的计数器级联更多位数的计数器
进位传递:扩展时进位传递到高位片
集成化的 4 位二进制计数器逻辑图 用负边沿 D 触发器构成的 4 位二进制计数器
R D ‾ \overline{R_D} R D CLR \text{CLR} CLR L L L T T T P P P CP \text{CP} CP 功能
0 0 0 - - - X X X - 清零(异步) 1 1 1 0 0 0 - - - ↓ \downarrow ↓ 清零(同步) 1 1 1 1 1 1 0 0 0 - - ↓ \downarrow ↓ Load(并行数据输入) 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 ↓ \downarrow ↓ Count(计数) 1 1 1 1 1 1 1 1 1 0 0 0 - - Hold(保持),RC = 0 \text{RC} = 0 RC = 0 1 1 1 1 1 1 1 1 1 1 1 1 0 0 0 - Hold(保持)
CLR \text{CLR} CLR
只要 CLR = 0 \text{CLR} = 0 CLR = 0 0 0 0 D A = CLR ⋅ Q A ‾ , D B = CLR ⋅ ( Q B ⊕ Q A ) , D C = CLR ⋅ ( Q C ⊕ Q B Q A ) , D D = CLR ⋅ ( Q D ⊕ Q C Q B Q A ) .
\begin{align*}
D_A & = \text{CLR} \cdot \overline{Q_A}, \\
D_B & = \text{CLR} \cdot (Q_B \oplus Q_A), \\
D_C & = \text{CLR} \cdot (Q_C \oplus Q_BQ_A), \\
D_D & = \text{CLR} \cdot (Q_D \oplus Q_CQ_BQ_A).
\end{align*}
D A D B D C D D = CLR ⋅ Q A , = CLR ⋅ ( Q B ⊕ Q A ) , = CLR ⋅ ( Q C ⊕ Q B Q A ) , = CLR ⋅ ( Q D ⊕ Q C Q B Q A ) .
L L L
本质上 L L L D A = CLR ⋅ ( L ‾ A + L Q A ‾ ) , D B = CLR ⋅ ( L ‾ B + L ( Q B ⊕ Q A ) ) , D C = CLR ⋅ ( L ‾ C + L ( Q C ⊕ Q B Q A ) ) , D D = CLR ⋅ ( L ‾ D + L ( Q D ⊕ Q C Q B Q A ) ) .
\begin{align*}
D_A & = \text{CLR} \cdot (\overline{L}\; A + L\;\overline{Q_A}), \\
D_B & = \text{CLR} \cdot (\overline{L}\; B + L\;(Q_B \oplus Q_A)), \\
D_C & = \text{CLR} \cdot (\overline{L}\; C + L\;(Q_C \oplus Q_BQ_A)), \\
D_D & = \text{CLR} \cdot (\overline{L}\; D + L\;(Q_D \oplus Q_CQ_BQ_A)).
\end{align*}
D A D B D C D D = CLR ⋅ ( L A + L Q A ) , = CLR ⋅ ( L B + L ( Q B ⊕ Q A )) , = CLR ⋅ ( L C + L ( Q C ⊕ Q B Q A )) , = CLR ⋅ ( L D + L ( Q D ⊕ Q C Q B Q A )) .
T T T
设计 RC \text{RC} RC
四位二进制计数器 RC = Q D Q C Q B Q A \text{RC} = Q_DQ_CQ_BQ_A RC = Q D Q C Q B Q A
十进制计数器 RC = Q D Q C ‾ Q B ‾ Q A \text{RC} = Q_D\overline{Q_C}\overline{Q_B}Q_A RC = Q D Q C Q B Q A
当 T = 0 T = 0 T = 0 T = 1 T = 1 T = 1 D A = CLR ⋅ ( L ‾ A + L ( T ‾ Q A + T Q A ‾ ) , D B = CLR ⋅ ( L ‾ B + L ( T ‾ Q B + T ( Q B ⊕ Q A ) ) ) , D C = CLR ⋅ ( L ‾ C + L ( T ‾ Q C + T ( Q C ⊕ Q B Q A ) ) ) , D D = CLR ⋅ ( L ‾ D + L ( T ‾ Q D + T ( Q D ⊕ Q C Q B Q A ) ) ) , RC = Q D Q C Q B Q A T .
\begin{align*}
D_A & = \text{CLR} \cdot (\overline{L}\; A + L\;(\overline{T}\; Q_A + T\;\overline{Q_A}), \\
D_B & = \text{CLR} \cdot (\overline{L}\; B + L\;(\overline{T}\; Q_B + T\;(Q_B \oplus Q_A))), \\
D_C & = \text{CLR} \cdot (\overline{L}\; C + L\;(\overline{T}\; Q_C + T\;(Q_C \oplus Q_BQ_A))), \\
D_D & = \text{CLR} \cdot (\overline{L}\; D + L\;(\overline{T}\; Q_D + T\;(Q_D \oplus Q_CQ_BQ_A))), \\
\text{RC} & = Q_DQ_CQ_BQ_AT.
\end{align*}
D A D B D C D D RC = CLR ⋅ ( L A + L ( T Q A + T Q A ) , = CLR ⋅ ( L B + L ( T Q B + T ( Q B ⊕ Q A ))) , = CLR ⋅ ( L C + L ( T Q C + T ( Q C ⊕ Q B Q A ))) , = CLR ⋅ ( L D + L ( T Q D + T ( Q D ⊕ Q C Q B Q A ))) , = Q D Q C Q B Q A T .
此时的问题是片间进位信号是通过 RC \text{RC} RC
串行扩展,RC 逐片传递
P P P
为了提高计数频率,再引入输入 P P P T P = 1 TP = 1 TP = 1 P = 0 P = 0 P = 0 D A = CLR ⋅ ( L ‾ A + L ( T P ‾ Q A + T P Q A ‾ ) , D B = CLR ⋅ ( L ‾ B + L ( T P ‾ Q B + T P ( Q B ⊕ Q A ) ) ) , D C = CLR ⋅ ( L ‾ C + L ( T P ‾ Q C + T P ( Q C ⊕ Q B Q A ) ) ) , D D = CLR ⋅ ( L ‾ D + L ( T P ‾ Q D + T P ( Q D ⊕ Q C Q B Q A ) ) ) .
\begin{align*}
D_A & = \text{CLR} \cdot (\overline{L}\; A + L\;(\overline{TP}\; Q_A + TP\;\overline{Q_A}), \\
D_B & = \text{CLR} \cdot (\overline{L}\; B + L\;(\overline{TP}\; Q_B + TP\;(Q_B \oplus Q_A))), \\
D_C & = \text{CLR} \cdot (\overline{L}\; C + L\;(\overline{TP}\; Q_C + TP\;(Q_C \oplus Q_BQ_A))), \\
D_D & = \text{CLR} \cdot (\overline{L}\; D + L\;(\overline{TP}\; Q_D + TP\;(Q_D \oplus Q_CQ_BQ_A))).
\end{align*}
D A D B D C D D = CLR ⋅ ( L A + L ( TP Q A + TP Q A ) , = CLR ⋅ ( L B + L ( TP Q B + TP ( Q B ⊕ Q A ))) , = CLR ⋅ ( L C + L ( TP Q C + TP ( Q C ⊕ Q B Q A ))) , = CLR ⋅ ( L D + L ( TP Q D + TP ( Q D ⊕ Q C Q B Q A ))) .
此时的问题是最高位的 RC 为高电平并不表示整体进位!此时各个位的 RC 全部与起来,如果为高电平,才表示整体进位。
快速扩展
注意 :在应用 74163(或 74161)集成化 4 位二进制计数器的时候,记得将 CP \text{CP} CP CLR = T = P = 1 \text{CLR} = T = P = 1 CLR = T = P = 1
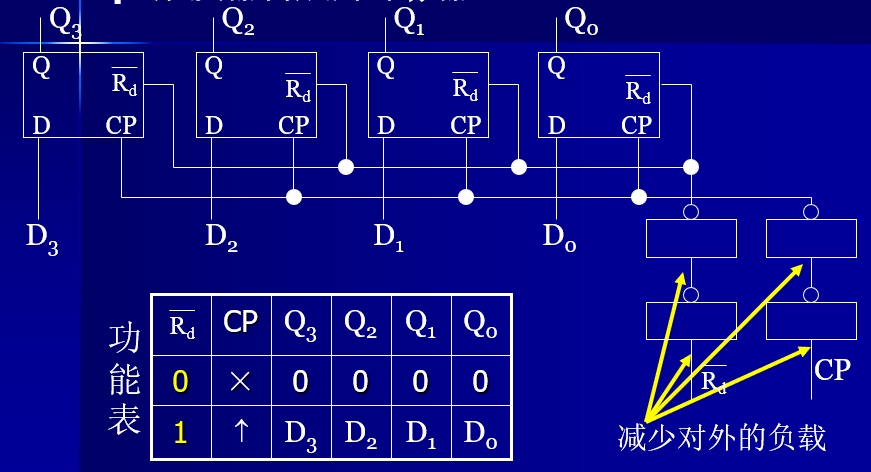
寄存器 基本寄存器
寄存器的基本功能是存储。
4D 寄存器逻辑图
注意 :对 R d ‾ \overline{R_d} R d CP \text{CP} CP 减少对外的负载 。
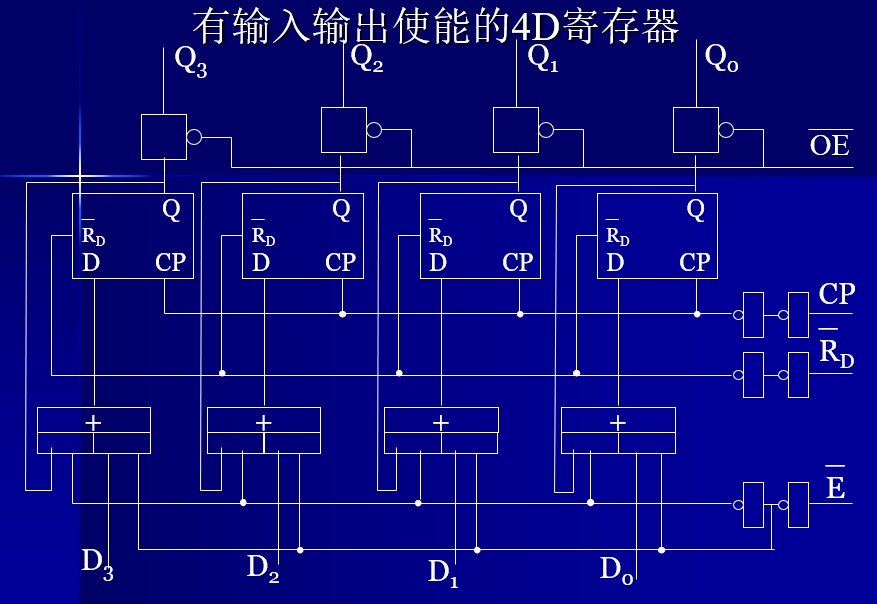
输入数据为 D D D E ‾ \overline{E} E O E ‾ \overline{OE} OE
功能表
R d ‾ \overline{R_d} R d E ‾ \overline{E} E CP \text{CP} CP D D D O E ‾ \overline{OE} OE Q n + 1 Q_{n+1} Q n + 1 功能
0 0 0 - - - - 0 0 0 异步置零 1 1 1 1 1 1 ↑ \uparrow ↑ - 0 0 0 Q n Q_n Q n 保持 1 1 1 0 0 0 ↑ \uparrow ↑ D D D 0 0 0 D D D 置数 1 1 1 - - - 1 1 1 Z Z Z 拒绝输入输出
逻辑图
带使能端的 4D 寄存器逻辑图 移位寄存器
在计算机中使用的寄存器需要支持移位功能 ,例如在乘法运算中,需要将部分积移位,在除法运算中,需要将余数移位;移位寄存器应运而生。
移位寄存器 指的是,每来一个时钟脉冲(移位命令),寄存器中的数据就按照顺序左(右)移动一位。因此,必须采用边沿触发器 或主从触发器 。
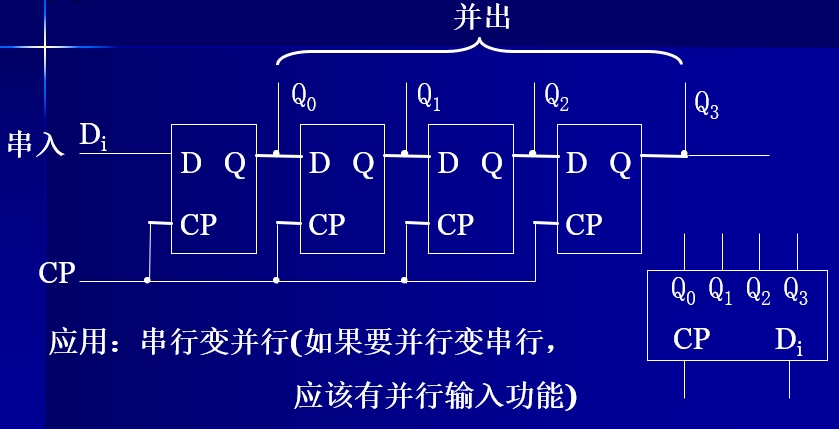
串入-并出移位寄存器
逻辑图:
串入-并出移位寄存器逻辑图 并入-并出移位寄存器
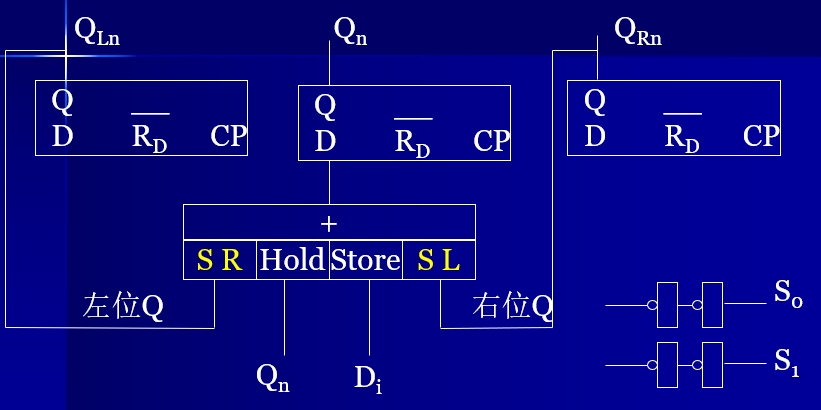
功能表:
R D ‾ \overline{R_D} R D S 0 S_0 S 0 S 1 S_1 S 1 D i D_i D i CP \text{CP} CP Q n + 1 Q_{n+1} Q n + 1 功能
0 0 0 - - - - 0 0 0 异步置零 1 1 1 0 0 0 0 0 0 - ↑ \uparrow ↑ Q n Q_n Q n 保持 1 1 1 1 1 1 0 0 0 - ↑ \uparrow ↑ Q L , n Q_{L, n} Q L , n 右移 1 1 1 0 0 0 1 1 1 - ↑ \uparrow ↑ Q R , n Q_{R, n} Q R , n 左移 1 1 1 1 1 1 1 1 1 D D D ↑ \uparrow ↑ D D D 置数
状态方程:
Q n + 1 = S 0 ‾ S 1 ‾ Q n + S 0 S 1 ‾ Q L , n + S 0 ‾ S 1 Q R , n + S 0 S 1 D
Q_{n+1} = \overline{S_0}\;\overline{S_1}Q_n + S_0\overline{S_1}Q_{L,n} + \overline{S_0}S_1Q_{R, n}+ S_0S_1D
Q n + 1 = S 0 S 1 Q n + S 0 S 1 Q L , n + S 0 S 1 Q R , n + S 0 S 1 D
并入-并出移位寄存器逻辑图 应用举例:用移位寄存器设计信号发生器
信号发生器的用途
通讯设备的同步系统中,需要产生一些顺序码,用于设备间的同步
复杂的控制系统,需要有特定的信号序列
设计方法
能确定与 D D D
无堵塞 :能自行进入工作循环
假设需要产生信号长度为 m = 6 m = 6 m = 6 101000 101000 101000 n n n 2 n ≥ m 2^n \ge m 2 n ≥ m
取 n = 3 n = 3 n = 3 010 010 010 100 100 100 101 101 101 n = 4 n = 4 n = 4
Q 0 Q_0 Q 0 Q 1 Q_1 Q 1 Q 2 Q_2 Q 2 Q 3 Q_3 Q 3
1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 1 1 1 0 0 0 1 1 1 0 0 0 0 0 0 1 1 1 0 0 0 1 1 1 0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1
D i D_i D i Q 0 Q_0 Q 0 Q 0 Q_0 Q 0
Q 3 Q 2 \ Q 1 Q 0 Q_3Q_2\backslash Q_1Q_0 Q 3 Q 2 \ Q 1 Q 0 00 00 00 01 01 01 11 11 11 10 10 10
00 00 00 - 0 0 0 - 1 01 01 01 0 0 0 0 0 0 - - 11 11 11 - - - - 10 10 10 1 1 1 - - 0
化简后,可以得到
D i = Q 1 Q 3 ‾ + Q 1 ‾ Q 3 = Q 1 ⊕ Q 3 .
D_i = Q_1\overline{Q_3} + \overline{Q_1}Q_3 = Q_1 \oplus Q_3.
D i = Q 1 Q 3 + Q 1 Q 3 = Q 1 ⊕ Q 3 .
graph TD
subgraph 非工作循环
subgraph a
0
end
subgraph b
3 --> 7
7 --> 15
15 --> 14
14 --> 12
12 --> 9
9 --> 3
end
subgraph c
6 --> 13
13 --> 11
11 --> 6
end
end
subgraph 工作循环
1 --> 2
2 --> 5
5 --> 10
10 --> 4
4 --> 8
8 --> 1
end
注意 :如果信号发生器启动时进入非工作循环状态,则必须经过若干个时钟周期以后能进入工作循环。
改动思路 :对于所有的非工作循环,取其中一个或多个非工作循环状态,令其的次态为工作循环。
这本质上是在限制 Karnaugh 图中的任意项为具体的值。
例如,将 0000 0000 0000
Q 3 Q 2 \ Q 1 Q 0 Q_3Q_2\backslash Q_1Q_0 Q 3 Q 2 \ Q 1 Q 0 00 00 00 01 01 01 11 11 11 10 10 10
00 00 00 1 1 1 0 0 0 - 1 1 1 01 01 01 0 0 0 0 0 0 - - 11 11 11 - - - - 10 10 10 1 1 1 - - 0 0 0
类似这样的步骤,将所有非工作循环纳入工作循环中,可以得到
D i = Q 1 Q 3 ‾ + Q 0 ‾ Q 1 ‾ Q 2 ‾ .
D_i = Q_1\overline{Q_3} + \overline{Q_0}\;\overline{Q_1}\;\overline{Q_2}.
D i = Q 1 Q 3 + Q 0 Q 1 Q 2 .
graph LR
0 --> 1
1 --> 2
2 --> 5
5 --> 10
10 --> 4
4 --> 8
8 --> 1
15 --> 14
14 --> 12
12 --> 8
7 --> 14
13 --> 11
11 --> 6
9 --> 3
3 --> 6
6 --> 12
第 7 章 可编程逻辑电路
“软件固化”和“以存代算”的理念催生了“用软件设计硬件”的新思路,进而诞生了多种硬件设计语言(Hardware Design Language,HDL)。随着硬件设计技术的进步,我们获得了显著的优势:用户可编程性使得设计修改变得便捷,设计本身也变得更加灵活,更易于转化为现实产品。
可编程逻辑器件(Programmable Logic Device,PLD)是一大类集成电路的总成,包括:
ROM(Read-only Memory):只读存储器
PLA(Programmable Logic Array):可编程逻辑阵列
PAL(Programmable Array Logic):可编程阵列逻辑
GAL(General Array Logic):通用阵列逻辑
……
只读存储器(ROM) 存储器的性质
只读存储器(ROM)
一旦信息写入,在运行机器上只读
存放固定信息,例如程序,常数,指令等
信息“非易失”(nonvolatile)
结构简单,规律性强,容量大
随机存储器(RAM)
ROM 的类别
掩模型 ROM(Mask ROM)(工厂编程)
可编程 ROM(PROM)(用户一次编程)
出厂保留全部熔丝,用户可编程但不可改写
与阵列固定,或阵列可编程
可改写 ROM(EPROM)(用户多次编程)
光可改写(UV EPROM)
电可改写(EEPROM)
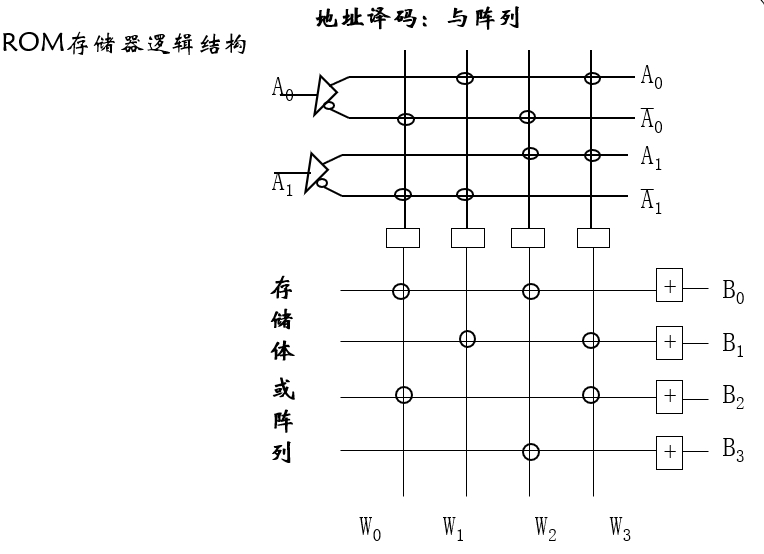
ROM 分类 ROM 上例中的与阵列表示:
W 0 = A 0 ‾ A 1 ‾ , W 1 = A 0 A 1 ‾ , W 2 = A 0 ‾ A 1 , W 3 = A 0 A 1 ,
\begin{align*}
W_0 & = \overline{A_0}\;\overline{A_1}, \\
W_1 & = A_0\overline{A_1}, \\
W_2 & = \overline{A_0}A_1, \\
W_3 & = A_0A_1,
\end{align*}
W 0 W 1 W 2 W 3 = A 0 A 1 , = A 0 A 1 , = A 0 A 1 , = A 0 A 1 , B 0 = W 0 + W 2 , B 1 = W 1 + W 3 , B 2 = W 0 + W 3 , B 3 = W 2 .
\begin{align*}
B_0 & = W_0 + W_2, \\
B_1 & = W_1 + W_3, \\
B_2 & = W_0 + W_3, \\
B_3 & = W_2.
\end{align*}
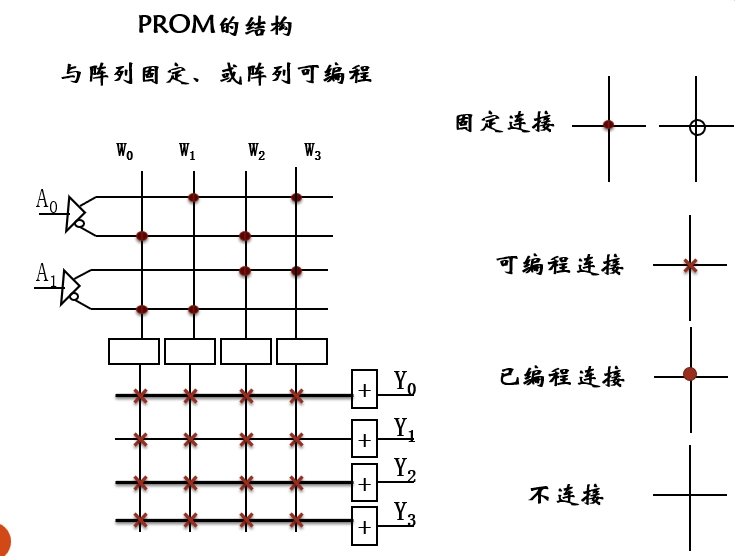
B 0 B 1 B 2 B 3 = W 0 + W 2 , = W 1 + W 3 , = W 0 + W 3 , = W 2 . PROM
上例 PROM 中的与阵列表示:
W 0 = A 0 ‾ A 1 ‾ , W 1 = A 0 A 1 ‾ , W 2 = A 0 ‾ A 1 , W 3 = A 0 A 1 .
\begin{align*}
W_0 & = \overline{A_0}\;\overline{A_1}, \\
W_1 & = A_0\overline{A_1}, \\
W_2 & = \overline{A_0}A_1, \\
W_3 & = A_0A_1.
\end{align*}
W 0 W 1 W 2 W 3 = A 0 A 1 , = A 0 A 1 , = A 0 A 1 , = A 0 A 1 .
注意 :推荐 ROM 中与阵列的画法:
一二行,一下一上一下一上;
三四行,两下两上两下两上;
五六行,四下四上四下四上;
七八行,八下八上八下八上;
……
可编程逻辑阵列(PLA)
ROM 的特点为输入地址和存储信息一一对应 ,这导致与阵列表示的译码器包括了全部最小项 ,信息表完全。
为了提高芯片的利用率,与阵列不一定产生所有的最小项,只需产生逻辑函数所需的乘积项即可。
PLA 针对这一点,进行逻辑压缩 。
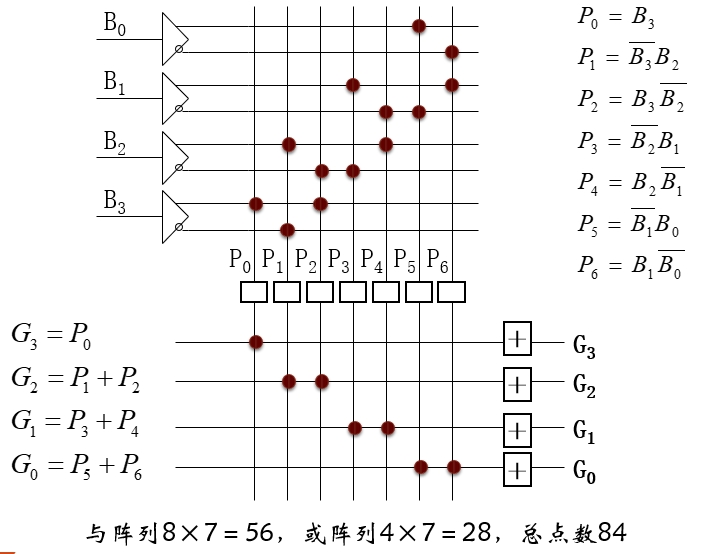
用 PLA 实现 8421 码到格雷码的转换
8421 码表示为 B 3 B 2 B 1 B 0 B_3B_2B_1B_0 B 3 B 2 B 1 B 0 G 3 G 2 G 1 G 0 G_3G_2G_1G_0 G 3 G 2 G 1 G 0
PLA 实现 8421 码到格雷码的转换 PLA 的性质
与阵列可编程,形成 P P P
或阵列可编程
PLA 的读出方式:一组地址可以选中多个 P P P
PLA 和 ROM 的区别:
ROM 的信息表原封不动,全译码
PLA 做了逻辑压缩,信息表改动很大,但逻辑上等价
PLA 的容量表示:(输入数 2 N 2N 2 N × \times × P P P × \times × M M M
2 N 2N 2 N P P P M M M
PROM、PLA、PAL 对比
PROM
与阵列固定,或阵列可编程 ,实现组合逻辑实现时序逻辑电路需要外加触发器
PLA
与或阵列均可编程 ,实现组合逻辑实现时序逻辑电路需要外加触发器
PAL
与阵列可编程,或阵列固定 不同的芯片可实现不同的逻辑,有些 PAL 只能实现组合逻辑电路,有些只能实现时序逻辑电路
一次性编程
PROM、PLA、PAL 共同存在的问题:不存在只用一种芯片,既可以实现组合逻辑电路,又可以实现时序逻辑电路。
GAL(General Array Logic,通用阵列逻辑)是为解决这一问题而产生的芯片。
注意 :GAL 的基本逻辑结构与 PAL 相同,与阵列可编程,或阵列固定 。
可编程器件工艺演化过程
PROM → \to →
从只有或阵列可编程变为与、或阵列都可编程
更加灵活,能节省码点
PLA → \to →
工艺:简化工艺,降低成本(熔丝工艺,一次编程)
结构:输入/输出共用
PAL 是专用词,MMI 公司的产品
PAL → \to →
工艺:电可擦除,多次编程
结构:输出宏单元,更通用
GAL 是 Lattice 公司 1985 年专利
补充 设计中的实用化技术 负载问题
输入缓冲:减少外部负载
内部负载分配
输出的扇出最大化(用 Q ‾ \overline{Q} Q
可靠性问题
设计的电路结构规则:如设计电路中有时用“异或”而不用“与或”
传输延迟可预测,可读性好,布线方便
添加冗余电路:消除竞争与冒险
扩展问题
设计所有的集成电路都要考虑扩展,没有可扩展性的设计是没有生命力的。
线与问题
总线的接口电路采用三态结构
集开极电路的“线与”问题
自启动问题
自启动问题是所有时序电路都必须解决的问题,否则设计出来的产品是废品。