论文阅读:The Hitchhiker's Guide to Operating Systems
TL;DR:用形式化语言理解 OS——OS 是一个管理状态机的系统。
ATC'23, 论文链接
Everything is a State Machine
所有的系统——只要能被称为“系统”——都可以通过一定的形式化语言进行建模,然后看成一个状态机。
程序(program)是状态机
高级语言写的程序可以用编译器编译得到汇编语言。对于汇编语言来说,每条指令要么 (a) 对寄存器进行操作,要么 (b) 对内存进行操作。因此,程序对应的状态机可以用一个五元组
对于 中的状态 ,我们可以用一个二元组来表示,,分别对应着寄存器值与内存布局。 是指令集合,执行一条指令,对应着状态之间的转移函数 。程序正常退出时会落入集合 中的状态。
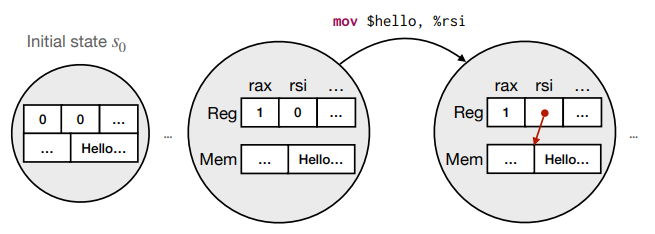
从这个角度来看,没有 System Call 的(用户)程序其实什么都做不了,它只能修改寄存器和分配给自己的内存。只有使用 System Call,它才能和 OS 进行交互,做更多的事情——例如修改内存映射(mmap)或者终止程序的运行(exit)。
Without system calls, the program (state machine) is a "closed world" that can only perform arithmetic and logical operations over memory and register values.
裸机(bare-metal)是状态机
与用户程序相似,裸机的运行本质上也是指令执行的过程,可以被视作一个状态机。区别在于,裸机需要通过端口或 MMIO 与外部世界交互,并且在任意时刻都有可能因外部中断而触发非确定性的跳转。
OS 是状态机的管理者
每个进程的初始状态 (包含了 initial memory layout)由 ABI 与该程序的二进制文件唯一决定,其转移函数也由二进制文件确定。从这个角度看,操作系统可视为一个管理多种状态机的系统。它记录多个状态机目前都位于什么状态,并且管理何时从这些状态进行转移。
OS 作为管理者,为每个进程提供了一定程度的抽象。这样的 hierarchy 很像底下的小喽喽并不需要考虑大佬们在商讨什么。例如,OS 使用页表进行虚拟内存的管理,而每个进程对此毫不知情;每当有外部中断发生时,OS 会接管当前状态,处理完后再将控制流转交给进程,此时进程感受不到中断,它们仍然认为控制流是完整的。
再仔细考虑 trap/interrupt handler:在处理中断和异常时,需要保存当前现场;这其实就是在保存一个进程状态机的状态(各种寄存器的值以及当前内存布局),以供控制流转交回进程时能够恢复现场。
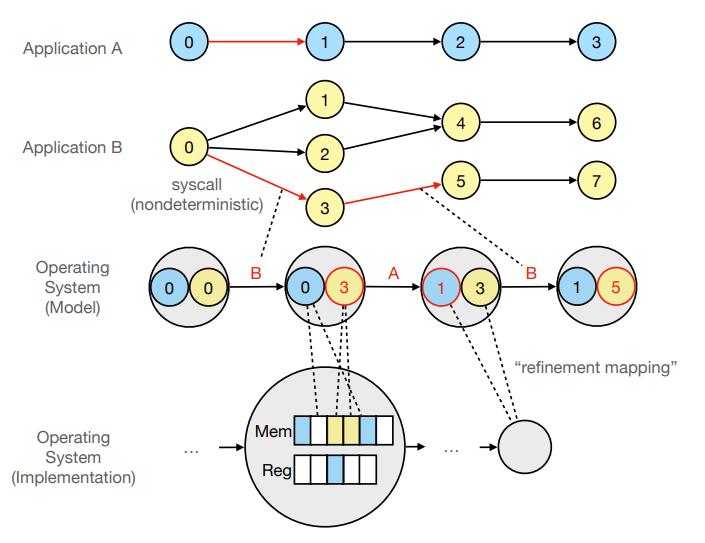
上图完美地阐释了“OS 是状态的管理者”这句话。
The operating system provides system calls as services and leverages application-invisible states (e.g., page table) to give processes the illusion of continuous state machine execution.
API 是对状态机的操作
从状态机的角度来看,API 对状态机进行“宏观”操作。
fork():复制一个状态,寄存器和内存也被随之(深)复制。execev(path, argv, envp):将一个状态重置为path指定的二进制文件所确定的初态。exit(status):将当前状态机从 OS 中移除,并且返回status。
Trace 是状态机中的一条路径
如果我们将程序运行的所有状态记录下来,那么它将在状态机(这个图)上构成一条路径。利用这条路径,我们可以方便地对程序进行调试。然而,记录完整轨迹在工程实践中并不现实。原因在于:
- 数据量过大:程序每执行一条指令都会导致状态变化,而状态本身可能包含寄存器值和内存布局等大量信息。现代计算机每秒可能执行数十亿条指令,如果完整记录所有状态快照和状态转移,将会占用巨大的存储空间。
- 大部分状态信息是冗余的:理解程序执行通常只需要轨迹中的很小一部分信息,而绝大多数状态对特定分析任务无关紧要。
因此,我们可以考虑只记录 中的一部分。断点告诉我们,什么时候需要“记录一个状态”。
文章中提到了 Time-travel Debugging,通过记录相邻状态之间的增量变化(而不是完整快照)来实现对轨迹的回溯。文章中还提到了 Trace 和 Profiler,通过在程序逻辑相关的重要状态转移处插入探针(probe),可以记录诊断信息,例如函数调用栈、返回值等。
唯一比较棘手的点在于状态机的状态爆炸问题,这是 Non-deterministic State Machine 固有的通病——例如,系统调用的返回值有很多种可能。文章提到了符号执行(Symbolic Execution):与其去枚举一个在后续过程中会参与运算的 32 位整数 的取值(共有 种可能),不如将其直接看作是一个符号,并在运行时对符号施加约束来代替显式枚举所有可能的状态。这种技术允许我们在无需穷举所有状态的情况下,在数学上验证程序行为的正确性。
Emulate State Machines with Executable Models
MOSAIC 是一个用 Python 模拟的、基于状态机的 OS,它实现了部分 System Call。
记得安装 psutil 这个 Python 包。
A fork() in the Road
利用 MOSAIC,可以轻松模拟 fork() 在多线程情况下的输出情况。
1def main():
2 N = 2 # Let N = 2
3 heap.buf = ''
4 for _ in range(N):
5 pid = sys_fork()
6 sys_sched()
7 heap.buf += f'️{pid}\n'
8 sys_write(heap.buf)
运行
1python3 mosaic.py --check examples/fork-buf.py | grep stdout | sort | uniq
Application: Specification of Systems
对于有限大小的状态机,我们可以通过枚举状态转移图中所有可到达的顶点来进行“暴力证明”,以验证一些性质的正确性。
状态机模型还可以作为参考,用于验证真实 OS 实现的正确性。例如,我们可以用相同的输入运行模型和真实的 OS,然后比较它们的输出。这也是我在 OS 大实验中将要关注的部分。
Enumeration Demystifies Operating Systems
MOSIAC 还支持以 HTML 的形式导出状态机图,而且支持交互。对于上面的 fork() 的例子,导出的 HTML 如下:
可惜的是,MOSAIC 没办法解决状态空间爆炸问题,MOSAIC 在处理大量 fork() 的程序时显著变慢(例如 fork-buf.py 和 tocttou.py),因为我们的 fork() 是通过全系统重放实现的。
运行
1python3 examples/_reproduce.py
可以得到输出:
1--------------------- fork-buf (7 LOC) ---------------------
2 N=1 15 0.1s (149 st/s) 16.83MB
3 N=2 557 3.8s (147 st/s) 20.33MB
4 N=3 Timeout (>60s)
5-------------------- cond-var (34 LOC) ---------------------
6 N=1; T_p=1; T_c=1 33 <0.1s 17.33MB
7 N=1; T_p=1; T_c=2 306 0.2s (2014 st/s) 19.62MB
8 N=2; T_p=1; T_c=2 2799 1.2s (2346 st/s) 25.23MB
9 N=2; T_p=2; T_c=1 4666 2.1s (2189 st/s) 31.06MB
10--------------------- xv6-log (27 LOC) ---------------------
11 N=2 55 0.1s (499 st/s) 17.18MB
12 N=4 265 0.2s (1759 st/s) 17.73MB
13 N=8 6157 2.3s (2705 st/s) 40.29MB
14 N=10 28687 30.5s (939 st/s) 91.43MB
15--------------------- tocttou (24 LOC) ---------------------
16 P=2 33 0.1s (260 st/s) 17.14MB
17 P=3 97 0.3s (308 st/s) 17.57MB
18 P=4 367 3.4s (108 st/s) 19.15MB
19 P=5 1402 40.5s (34 st/s) 23.12MB
20------------------ parallel-inc (11 LOC) -------------------
21 N=1; T=2 40 <0.1s 17.01MB
22 N=2; T=2 164 <0.1s 17.86MB
23 N=2; T=3 6635 2.6s (2522 st/s) 38.52MB
24 N=3; T=3 52685 20.4s (2587 st/s) 146.31MB
25-------------------- fs-crash (25 LOC) ---------------------
26 N=2 90 0.1s (815 st/s) 17.34MB
27 N=4 332 0.1s (2784 st/s) 19.07MB
28 N=8 5136 4.3s (1183 st/s) 30.02MB
29 N=10 Timeout (>60s)
不过话说回来,作为一个以教学为主要目的的 OS 来说,MOSAIC 已经够用了。
MOSAIC 代码阅读
结合论文,可以对 MOSAIC 的代码进行分析。
MOSAIC System Calls
MOSAIC 支持部分 System Call。
代码中使用了装饰器语法,这样后文所有 System Call 的实现都可以用 @syscall 来将系统调用注册到 SYSCALLS 列表中。
MOSAIC Emulator
__init__
初始化操作系统状态。创建一个初始线程,绑定 main() 函数。初始化线程列表、共享堆、标准输出缓冲区和虚拟存储设备。
sys_spawn
- 功能: 创建一个共享堆的新线程,执行指定的函数。
- 实现: 新线程的上下文由函数
func(*args)返回的生成器对象初始化,堆与当前线程共享。
sys_fork
- 功能: 克隆当前线程,创建一个带有拷贝堆的新线程。
- 实现: 使用深度复制操作系统状态来避免直接克隆生成器产生的问题。返回新的线程 ID。
sys_sched
- 功能: 非确定性地切换到一个可运行的线程。
- 实现: 根据当前线程列表,返回每个线程的上下文切换选项。
sys_choose
- 功能: 在给定选项列表中返回一个非确定性选择。
- 实现: 返回一个选项字典,通过外部决策选择结果。
sys_write
- 功能: 将字符串写入模拟的标准输出。
- 实现: 将输入字符串追加到
self._stdout缓冲区。
sys_bread
- 功能: 从虚拟块存储设备读取指定键的值。
- 实现: 优先从缓冲区读取数据,若无数据则从持久存储读取。
sys_bwrite
- 功能: 将键值对写入虚拟块存储设备的缓冲区。
- 实现: 更新缓冲区中的键值对。
sys_sync
- 功能: 将缓冲区中的所有未完成数据写入持久存储。
- 实现: 将缓冲区数据合并到持久存储后清空缓冲区。
sys_crash
- 功能: 模拟系统崩溃,非确定性地持久化缓冲区中的部分数据。
- 实现: 对缓冲区数据的所有子集生成崩溃点,通过外部决策选择具体持久化结果。
replay
- 功能: 重放一系列操作记录,恢复系统状态。
- 实现: 按顺序执行操作记录中的每一步,返回最终状态。
_step
- 功能: 执行当前线程的下一步操作。
- 实现: 从当前线程的生成器中获取系统调用,调用对应的系统调用处理函数,更新系统状态。
state_dump
- 功能: 导出操作系统当前状态,便于外部分析和模型检查。
- 实现: 包括当前线程、线程上下文、堆状态、标准输出和存储设备状态的详细信息。
current
- 功能: 获取当前正在运行的线程对象。
- 实现: 返回线程列表中索引为
self._current的线程。
_switch_to
- 功能: 切换到指定的线程。
- 实现: 更新当前线程索引,重设全局变量
os和heap。
MOSAIC Runtime
MOSAIC Runtime 由 Checker 和 Parser 两部分组成。
MOSAIC Checker
Checker 中有两个重要的函数:run() 和 check()。run() 负责(随机地遍历)模拟一次运行情况,check() 负责验证所有的运行情况。
它们的返回值都是一个三元组 (source, vertices, edges):
-
source是(运行的)源代码。 -
vertices是:- 对于
run():所有state按照运行情况的顺序构成的列表,首个元素是初始状态st0。 - 对于
check():所有state构成的集合。
每一个
state都对应一个 Hash 值。 - 对于
-
edges是所有state之间转移边的列表。每一条边都由三元组(source, target, label)表示,其中source和target都是对应的 Hash 值,label表示选择的哪个choice。
MOSAIC Parser
Parser 负责解析并重写(将要运行的)代码。
Transformer 继承于 ast.NodeTransformer,重载了 visit_Call(self, node) 方法,将代码中所有的 System Call 都转为 yield (<syscall>, <*args>) 的形式。
| 重写前 | 重写后 |
|---|---|
| ```python examples/fork-buf.py (modified) def main(): N = 2 heap.buf = '' for _ in range(N): pid = sys_fork() sys_sched() heap.buf += f'️{pid}\n' sys_write(heap.buf) ``` | ```python def main(): N = 2 heap.buf = '' for _ in range(N): pid = (yield ('sys_fork', ())) yield ('sys_sched', ()) heap.buf += f'️{pid}\n' yield ('sys_write', (heap.buf,)) ``` |
main 函数
读入(待运行的)源代码,根据运行参数(--run 和 --check)来选择是(遍历)模拟此文件,还是利用状态机对此文件进行验证。
总结
就像 蒋炎岩老师在 操作系统原理 (2025 春季学期) - 数学视角的操作系统 中说的那样:
Take-home Message: 程序就是状态机;状态机可以用程序表示。因此:我们可以用更“简单”的方式 (例如 Python) 描述状态机、建模操作系统上的应用,并且实现操作系统的可执行模型。而一旦把操作系统、应用程序当做 “数学对象” 处理,那么我们图论、数理逻辑中的工具就能被应用于处理程序,甚至可以用图遍历的方法证明程序的正确性。
整篇论文的核心就是进程可以看作是状态机,OS 可以看作是管理状态机的系统。从这个角度来看能够对它进行枚举和验证。
- 本文作者:Clever_Jimmy
- 本文链接:https://leverimmy.top/2025/03/16/Paper-Reading-The-Hitchhiker-s-Guide-to-Operating-Systems/
- 版权声明:本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 协议进行许可。